|
|
|
|
News The Project Technology RoboSpatium Contribute Subject index Download Responses Games Gadgets Contact R11 - ConstructionThe video about R11MecanicsR11 is the type of rover that will unify my "Zoo" of vehicles that populated my RoboSpatium in the past. The first prototype already runs in my robot room, but there is still a lot to be done to make it a reliable explorer, thus this documentation is still under construction as well.
The mechanics is made of PLA using a 3D printer. Even while the chassis is large enough to implement all of the electronics, I will add a couple of millimeters in width and height to make installing the components more comfortable. ElectronicsParts list:I got all parts from my sponsor RS Components, thus the links in the table point to their online shop.
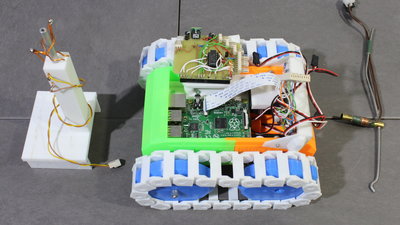
Most of the electronics is on a tiny board that can be plugged on the GPIO header of the Raspberry Pi. 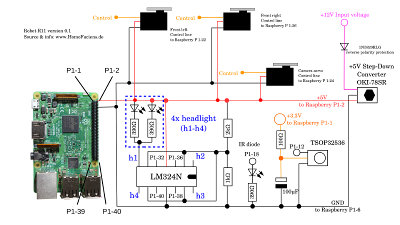
Circuit layout: The infrared interface is an option. SoftwareThe simple version of my software uses the Raspberry Pi in Access Point mode. With the web server Apache running on the Pi you can control the robot through a browser interface, same as in my RoboSpatium. The step-by-step instruction for the installation - starting with a fresh install of Rasbpian - is written in the "readme.txt" of the download package.DownloadThe download package includes the 3D files and schematics.The software is currently not part of the package, I am still writing on it! The CAD model is also not complete, because the robot is still under construction and I will alter almost all parts at least slightly in the not so far future! Test drivesYou can control R11 in my RoboSpatium.News The Project Technology RoboSpatium Contribute Subject index Archives Download Responses Games Links Gadgets Contact Imprint |
|
|