|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt R11 - KonstruktionDas Video zu R11MechanikR11 ist der Robotertyp, welcher meinen bisherigen "Zoo" an Fahrzeugen vereinheitlichen wird. Der erste Prototyp fährt bereits in meinem Roboterraum, aber es gibt noch viel zu tun, daher ist diese Dokumentation alles andere als vollständig.
Die Mechanik von R11 entstammt dem 3D Drucker. Das Chassis ist zwar groß genug, um alle Komponenten unterzubringen, ich werde dennoch ein paar Millimeter an Breite und Höhe hinzufügen, um die Elektronik komfortabler installieren zu können. ElektronikTeileliste:Die elektronischen Bauteile habe ich von meinem Sponsor RS Components erhalten, daher verweisen die Links in der Tabelle zu deren Online-Shop.
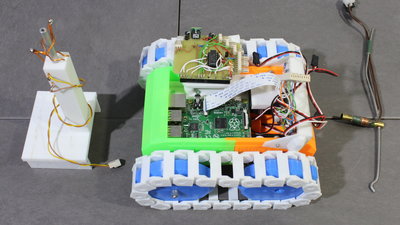
Die Elektronik ist auf einer kleinen Platine verlötet, die direkt auf die GPIOs des Raspberry Pi gesteckt werden kann. 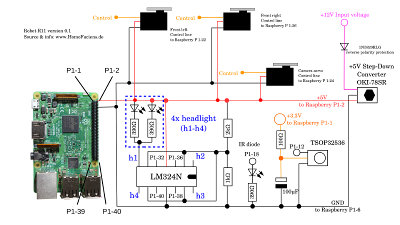
Schaltplan: Die Infrarot-Schnittstelle ist optional. SoftwareDie vereinfachte Version der von mir verwendeten Software verwendet den Raspberry Pi als Access-Point. Der Webserver Apache erm&ougl;icht die Steuerung per Browser-Interface, so wie es auch in meinem RoboSpatium der Fall ist. Die Schritt für Schritt Installationsanweisung, beginnend mit einer neuen Installation von Raspbian ist in der "Readme.txt" niedergeschrieben.DownloadIn dem Download-Paket findet ihr die 3D-Dateien und die Schaltpläne.Da ich zur Zeit noch an der Software schreibe, ist diese noch nicht Teil des Download-Paketes! Ebenfalls unvollständig ist das CAD-Modell des Rovers - ich bin dabei, noch einiges abzuändern! TestfahrtenR11 dreht in meinem RoboSpatium seine Runden. Dort könnt ihr diesen Roboter steuern.Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|