|
|
|
|
News The Project Technology RoboSpatium Contribute Subject index Download Responses Games Gadgets Contact <<< R11 Raspberry pi R13 Mini-Stepper >>> R12 - ConstructionThe video about R12Mechanics
The mechanics of R12 is made from 3mm Aluminium sheets I have cut with my CNC v3.2.2. 
The IOT2020 is connected to WLAN through a mini PCI module. You can control the robot through a Browser interface. ElektronicsParts list:I got all parts from my sponsor RS Components, thus the links in the table point to their online shop.
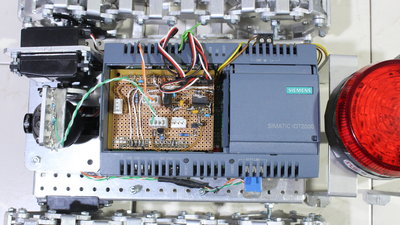
Most of the electronics is on a tiny board that can be plugged on the GPIO header of the IOT2020. I have soldered two linear voltage regulators on the board, but only one is needed. 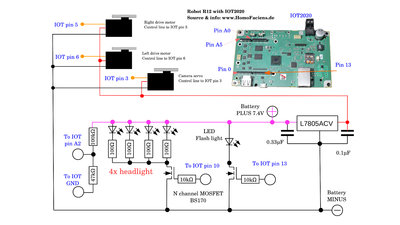
Circuit layout: The power comes from a 7.4V rechargeable Battery with 2000mAh which is good for more than one hour of operation. The red LED flash light is an option. 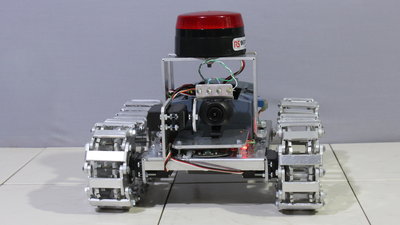
I am using an IP LAN camera type ACM-3601 to transmit live pictures to a Browser. 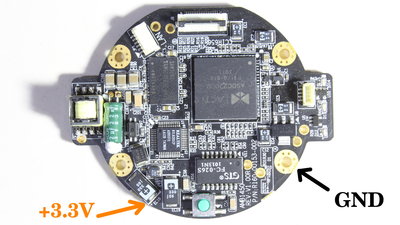
The camera normally uses PoE, but I have connected the +3.3V and one of the GND pins of the IOT2020 directly to the board of the camera. SoftwareYou can get the (experimental) software including the installation instruction and the circuit layout as download packageTest drivesR12 is a Rover I will take with me when going to maker fairs. If you visit me on one of those meetings you can have a test ride.More robots are available in my RoboSpatium. <<< R11 Raspberry pi R13 Mini-Stepper >>> News The Project Technology RoboSpatium Contribute Subject index Archives Download Responses Games Links Gadgets Contact Imprint |
|
|