|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt Plotter / Drucker / FräseAllgemeinesIn diesem Kapitel möchte ich euch meine Fräsmaschine vorstellen, die ich vor etwa 20 Jahren gebaut habe. Ich habe diese verwendet, um damit Teile für ferngesteuerte Modellflugzeuge anzufertigen. Angesteuert wurde die Fräse von einem 486 Intel Prozessor (4MB Arbeitsspeicher, sicherlich weniger als 1GB Festplatte, mittlerweile ist der Rechner verschrottet). Für das Video zum Wondermedia Laptop habe ich die Maschine wieder entstaubt und ein wenig herumprogrammiert, um die Motoren über die USB-Schnittstelle ansteuern zu können. Die Fräse habe ich außerdem durch einen Stift ersetzt, um ein wenig zeichnen zu können. Die Z-Achse wurde lediglich durch ein Servo angesteuert. Das nächste Video über kleine, günstige Computer handelte vom Raspberry Pi und um etwas neues zeigen zu können, habe ich den Stift durch eine kleine Pumpe ersetzt. Der Quellcode wurde erweitert und an die GPIO-Schnittstelle angepasst. Nun fungierte die Mechanik auch als Drucker. Die Fräsvorrichtung wurde verwendet, um ein Gehäuse für den Raspberry Pi anzufertigen.Die Präzision der Mechanik lässt im Vergleich zu kommerziellen Produkten zu wünschen übrig, aber sie ist großartig im Vergleich zu den krummen Linien die ich zu Papier bringe, wenn ich mit meinen Händen zeichne. Vorteilhaft ist die Tatsache, dass die Mechanik einfach nachzubauen ist - fast alle Teile sind im Baumarkt erhältlich. Durch die offenliegende Mechanik ist die Funktionsweise gut zu verstehen, was eines der Hauptanliegen dieser Seiten ist. Die Software ist in C geschrieben. Der Quellcode ist in der Rubrik Download erhältlich, aaaber: Das ganze ist in einem rein experimentellen Stadium! Es gibt keine graphische Oberfläche. Die einzig unterstützten Dateiformate sind Scalable Vector Graphics (*.svg, Plotter, Fräse) und 24bit Bitmap (*.bmp, Drucker). Klickt auf die Bilder, um die großen Versionen aufzurufen - Ich denke diese beantworten die meisten Fragen. Elektronik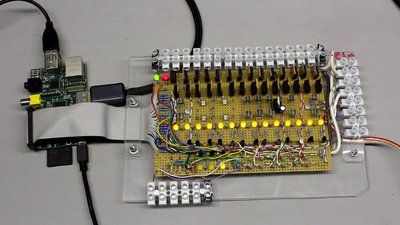
Die I/O Platine des Raspberry Pi steuert die Schrittmotoren, das Servo und die Pumpe an. 200mA fließen durch eine einzelne Spule der Schrittmotoren, wenn diese an 12V betrieben werden. Mechanik
Die Mechanik ist recht groß ausgefallen. Ich muss wohl ein 1:1 Modell des Airbus A380 im Kopf gehabt haben, als ich das Ding gebaut habe. Ich rate dazu, das Ganze eher klein zu bauen, zumindest dürfte die Präzision dadurch besser werden. Die Schienen der X- und Y-Achse bestehen aus Aluminiumleisten. Je stabiler diese ausfallen, um so weniger verbiegen sich diese wenn die Maschine läuft. 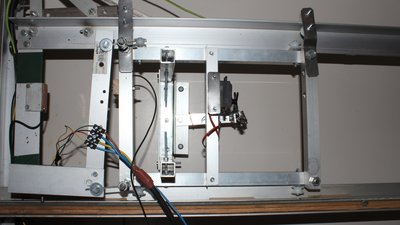
Der Schlitten der Y-Achse ist auf 4 Plastikrollen gelagert. 
Weitere 4 Rollen verhindern eine Bewegung des Schlittens zur Seite beziehungsweise ein Verdrehen der Mechanik. 
Das gilt auch für den Schlitten der X-Achse, jedoch sind hier anstelle der Plastikrollen stählerne Kugellager verbaut (teurer, aber präziser). 
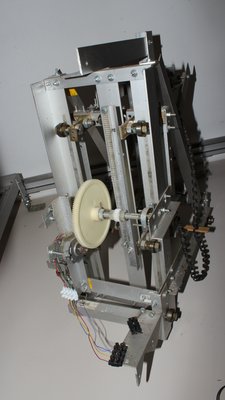
Der Antrieb besteht aus Schrittmotoren. Die Spitze eines T10 Torx-Bits dreht sich auf einer M6 Gewindestange. Andere Kombinationen sollten ebenfalls funktionieren. Zahnräder und Zahnstangen sind teurer. 
Die Schrittmotoren sind flexibel mit dem Schlitten verbunden (flache Stahlstäbe an den beiden Befestigungspunkten). Klemmt die Mechanik irgendwo, beginnen die Torx-Bits über die Zahnstange zu rutschen. Das verhindert Besschädigungen der Antriebseinheit. 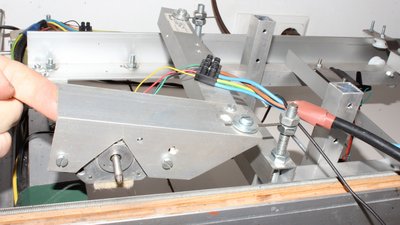
Zwei Motoren bewegen den Schlitten der X-Achse, lediglich einer den der Y-Achse. 
Fungiert die Mechanik als Plotter, so bewegt ein Servo den Stift hoch bzw. herunter. 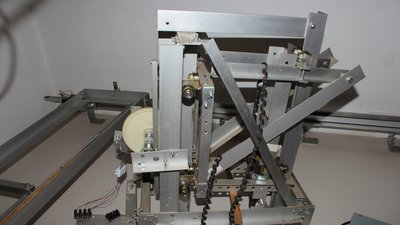
Der Schlitten der Fräse ist weitaus komplexer. Hier ist auch die Mechanik für die Z-Achse angebracht. 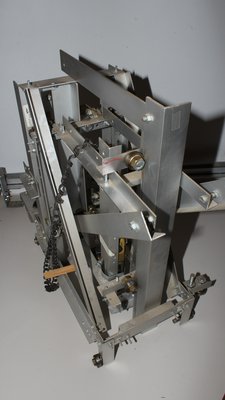
Die Z-Achse wird durch einen einzelnen Schrittmotor über Zahnräder und eine Zahnstange bewegt. Ein Nachteil dieser Mechanik ist die Tatsache, dass die Fräße nach unten fällt, sobald der Schrittmotor abgeschaltet wird. Das hat mich einige 1mm Bohrer gekostet... DruckerDas zentrale Element der Druckereinheit ist eine kleine Pumpe, die von einem kleinen Relais betrieben wird. Die ganze Sache funktioniert, allerdings nicht sehr zuverlässig. Die Qualität der Druckpunkte ist bescheiden (viele Sattelitentropfen, unterschiedliche Durchmesser, einige Aussetzer). Es macht Spaß, der Maschine zuzusehen, aber ohne weitere Optimierung taugt das Ganze nur als Demonstrationsobjekt. Die von mir verwendete Tinte auf Wasserbasis stammt aus einem Füller. Ich habe ebenfalls mit handelsüblicher Nachfülltinte experimentiert, jedoch ist die Oberflächenspannung von diesen Produkten zu gering. Die Flüssigkeit ist aus der Düse getropft, sobald ich den Tank befüllt habe (was eine riesige Sauerei zur Folge hatte). Möglicherweise findet jemand von euch heraus, wie man ein kleineres Loch in den unteren Klebestreifen (=Düse) bekommt, um derartige Tinte verwenden zu können. Verursacht durch den hydrostatischen Druck passiert das auch mit der wasserbasierten Tinte, wenn der Füllstand im Vorratsbehälter zu hoch ist.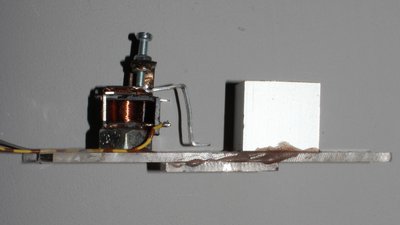
Die Pumpe des Druckers wird durch ein kleines 12V Relais angetrieben. Der kleine Hebel hämmert auf die obere Folie, sobald eine Spannung an die Spule angelegt wird. Durch Verdrehen der kleinen Schraube oben am Relais kann der Hub des Hebels eingestellt werden. 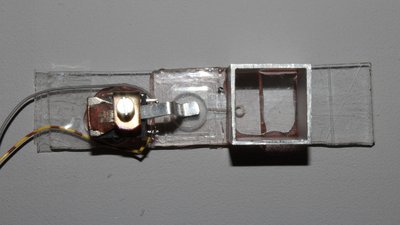
Der Durchmesser des großen Lochs in der oberen Platte beträgt 10mm und wird durch Klebeband abgedeckt. In dem Tank ist ein 2mm Loch gebohrt. Eine Nut verläuft auf der Unterseite der oberen Platte zwischen den beiden Bohrungen. 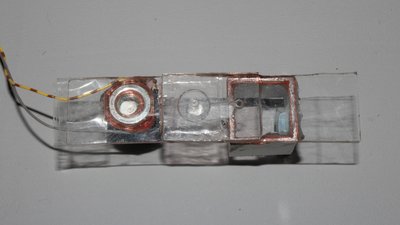
Ein 2mm Loch befindet sich in der unteren Platte. Auch dieses Loch ist mit Klebeband verschlossen. Ein kleines Loch ist in der Mitte des Klebebandes mit einer möglichst spitzen Nadel gestochen, welches als Düse fungiert. Die untere Platte verschließt das 2mm-Loch und die Nut zum Tintentank. Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|