Der Prototyp eines planetenweiten Forschungsroboters
Abbildung 1:
Rover Nummer 5 ist mein erster Roboter für Außeneinsätze. Es handelt sich um den Prototypen für eine Planetensonde. In Testfahrten sollen die Schwachstellen der Konstruktion ermittelt werden, bevor die Welttournee seines geplanten Nachfolgers beginnt.
Teileliste
Bauteil
Anzahl
Bemerkung
Sperrholz
See construction plan for dimensions
Chassis
Rochrasterplatine
1
Grundplatte für die Elektronik
Raspberry Pi
1
Internetverbindung
ATMega328P
mit Arduino Bootloader
1
Analogeing&aml;nge, Batteriemanagement
2N7000
4
Schalter Beleuchtung
IRF9Z34N
1
Batterie-Aus-Schalter
Doppelte H-Brücke
z.B. L298N
1
Motorensteuerung
Getriebemotoren
6
Fahrmotoren
Der Gesamtstrom von 3 Motoren muss unter 2A sein, wenn L298N Brücken verwendet werden.
L4940V5
1
5V Spannungsregler
Widerstände
7x 100kΩ
1x 33kΩ
4x 100Ω
Kondensatoren
2x 15pF
1x 0.1μF
1x 4.7μF (electrolytical)
LEDs
14
Beleuchtung
Servo
1
Kamera
Kamera
1
USB-Kamera oder Raspberry Pi Kameramodul
Konstruktion
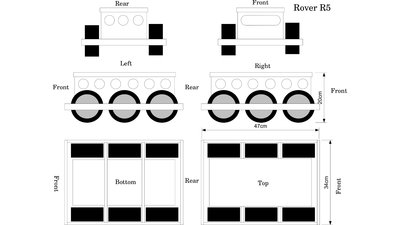
Abbildung 2:
R5 ist aus 6mm Pappelsperrholz gefertigt. Die Räder entstammen einem alten ferngesteuerten Geländefahrzeug und haben die Abmessungen 12 x 5.5cm.
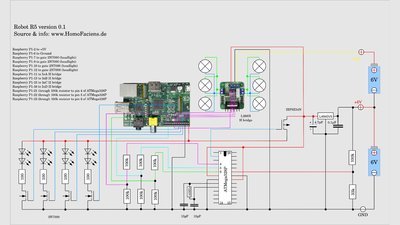
Elektronik
Abbildung 3:
Die Crew
Abbildung 4:
Schwachpunkte
Offenes Getriebe:
Sandkörner haben den Antrieb bei Testfahrten auf einem Spielplatz schnell blockiert.
Kommutierte Motoren:
Bürstenlose Motoren besitzen eine höhere Zuverlässigkeit und der Blockierstrom ist niedriger.
Frontscheibe:
Das Fenster muss höher werden, um den Kamerablick besser nach oben und unten richten zu können.
Akkus:
Die Kapazität sollte wesentlich größer sein, um eine längere Missionsdauer zu ermöglichen.
Solarzellen:
Die Solarzellen auf dem Dach des Rovers müssen alle Akkus gleichermaßen laden (nicht nur einen von zwei Bleiakkus).