|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt R4 - KonstruktionBedienungsanleitung R4Steuere R4 Das Video über R4Teileliste
Mechanik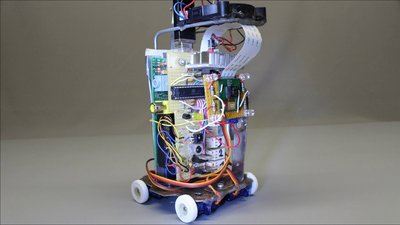
Der Zentralcomputer von R4 ist ein Raspberry Pi, ein extrem kostengünstiger Kleinstrechner. Die Abmessungen der Rovers betragen in etwa: 9 x 9 x 22cm (LxBxH) inklusive Strommast. 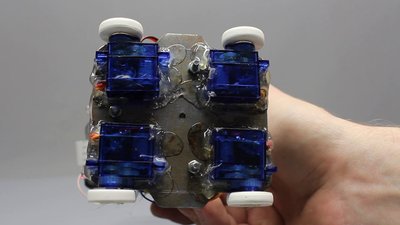
Angetrieben wird der Roboter von 4 Servos, die für kontinuierliche Rotation modifiziert wurden. 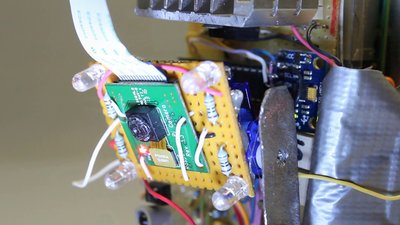
Ein fünftes Servo kann den Kamerawinkel ändern. 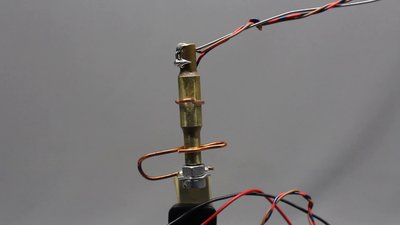
Die Stromversorgung erfolgt über einen Strommast mit Anti-Verdrill-Vorrichtung. Elektronik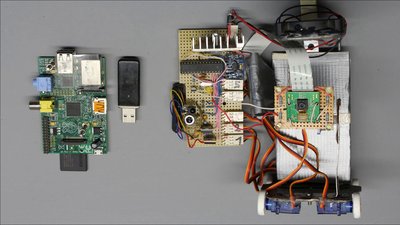
Ein Raspberry Pi und ein Atmel328P ermöglichen die Steuerung des Roboters über WLAN. 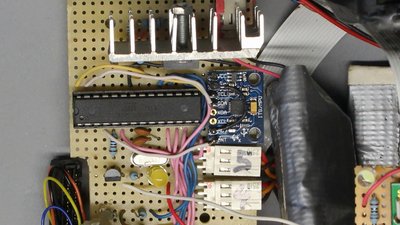
Erstmals habe ich einen Roboter mit Sensoren ausgestattet. Es handelt sich hierbei um eine Platine vom Typ MPU6050 mit Dreh- und Beschleunigungssensoren, die mit dem Atmel Mikrocontroller verbunden ist. 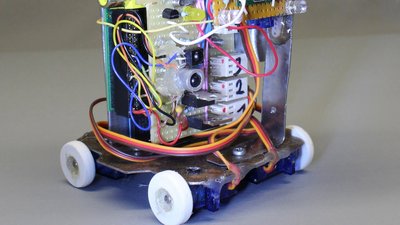
Über die Infrarotschnittstelle kann der Roboter mit anderen Mikrocontrollern kommunizieren. 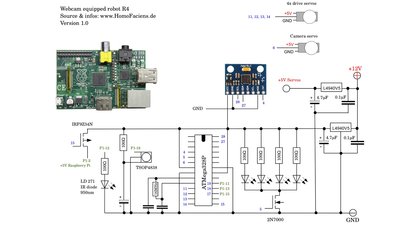
Schaltplan der R4 Peripherie. Die Infrarotschnittstelle wird in der vereinfachten Version der Software nicht verwendet und kann weggelassen werden (TSOP4838 + LD271). SteuersoftwareIn der Rubrik Download findet ihr eine stark vereinfachte Version der verwendeten Software. Die Installations- und Konfigurationsanweisungen befinden sich in der Datei README.txt.Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|