|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R13 Mini-Stepper R15 Hoverboard >>> R14 pi-top[4] Rover - KonstruktionDas Video zu R14Mechanik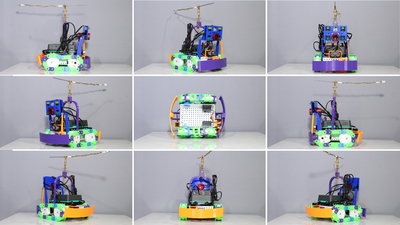
R14 ist ein weiterer Rover mit Kettenantrieb. Die Teile des Chassis entstammen dem 3D-Drucker. Als Zentralrechner dient ein pi-top[4] Teileliste:
Elektronik
Zentraler Rechner von R14 ist ein pi-top[4] (Details siehe hier). Dank des Sockels ist die Verkabelung des Fahrzeugs so schnell erledigt, wie bei noch keinem meiner vorherigen Rover-Projekte - der Lötkolben kommt nur sporadisch zum Einsatz. Als Antriebsmotoren fungieren zwei Standard-Servos für kontinuierliche Rotation. Diese werden an den 40-Pin Header auf der Oberseite angeschlossen - die Spannungsversorgung des +5V Pins kann Ströme bis zu 1.5A liefern. Die Kamera wird von einem Micro-Servo geschwenkt - auch dieses ist an den 40-Pin Header angeschlossen. Die Beleuchtung erfolgt über die LED-Module aus dem "Foundation-Kit", die mit den beiliegenden Kabeln schnell angeschlossen sind - R14 ist mein erster Rover mit bunter Beleuchtung. Da die Leuchtstärke der LEDs nicht sonderlich hoch ausfällt, habe ich ein zusätzliches Modul mit 4 weißen LEDs zusammengelötet. Somit wäre die Elektronik von R14 schon abgehakt, dem "Foundation Kit" liegen allerdings unter anderem noch ein Ultraschall- und ein Lichtsensor bei, die ich - weil es so einfach ist - ebenfalls verbaut habe. 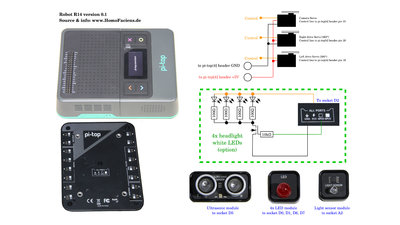
Der Schaltplan von R14: Die Beleuchtung mit weißen LEDs ist optional. Externe Stromversorgung (optional)Die externe Stromversorgung ist optional und nur für erfahrene Bastler zu empfehlen! Der Rover läuft mit dem eingebauten Akku für mehr als 2 Stunden, was im Normalfall mehr als ausreichend ist.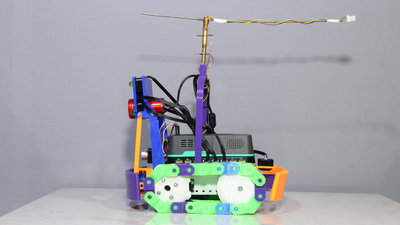
Strommast mit Anti-Verdrill-Vorrichtung für externe Spannungsversorgung. Zwischen der +12V Leitung und Masse ist eine Diode Typ SB5100 als Verpolungsschutz in Sperrichtungeingelötet. 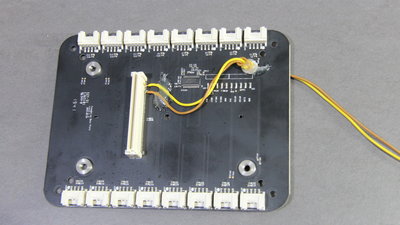
Die externe Stromversorgung wird über den Sockel eingespeist. An dem gelben Kabel liegen die +12V an, Masse enstprechend an dem braunen Kabel. Die Pinbelegung der "pi-top maker achitecture (PMA)" genannten Schnittstelle gibt's auf den Seiten von pi-top.com. SoftwareDie Steuerung der Peripherie erfolgt über ein Python Programm, das beim Systemstart geladen wird. Die Steuerkommandos werden per Webseite an das Python Programm übergeben. Auf dem pi-top[4] läuft dazu der Webserver Apache. Die Übertragung der Bilder zum Browser übernimmt das Programm "Motion", das ebenfalls auf dem pi-top[4] läuft. Der pi-top[4] muss über WLAN mit eurem Heimnetzwerk verbunden sein. Wird nun die IP-Adresse eures pi-top[4] im Browser eingegeben, könnt ihr den Rover steuern.DownloadSchaltplan, Installationsanleitung der Software und die 3D Dateien der Mechanik sind Bestandteil des Download-Paketes (2.9MB).TestfahrtenIn meinem RoboSpatium könnt ihr die Steuerung von R14 übernehmen.<<< R13 Mini-Stepper R15 Hoverboard >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|