|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Python: USB Kommunikation Maschinensteuerung per Webserver >>> Roboterarm v1.0Das Video zum KapitelVersion 1.0
Version 1.0 eines Roboterarmes ist als ein Wochenendeprojekt entstanden. Mit der Mechanik wollte ich die Qualität spezieller Gelenke testen, die ich in einem geplanten 3D-Drucker mit Delta-Mechanik einsetzen möchte. Das Projekt ist somit eine Weiterführung meiner Ideen zu justierbaren Gelenken. Als Wochenendprojekt standen mir somit nur Materialien aus meinem Vorrat zur Verfügung. Für die elektronischen Komponenten und Antriebsmotoren habe ich eine günstige CNC Maschine ausgeschlachtet, die Mechanik aus Dachlatten und Gewindestangen aufgebaut. In Sachen Software (siehe weiter unten) passt der Roboterarm recht gut in meine Reihe zu "Physical Computing". Mechanik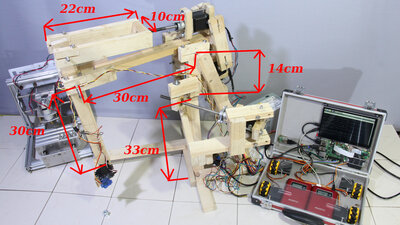
Die Abmessungen des Roboterarmes sind so Pi mal Daumen während des Zusammenbaus festgelegt worden. Daher kann ich hier keine exakte Bauanleitung bereitstellen, sondern beschränke mich auf eine grob mit Maßangaben versehene Fotografie. Es handelt sich um keinen High-Tech Industrieroboter, lasst euch von der Dachlattenkonstruktion inspirieren und setzt eure Phantasie ein, wenn ihr einen Nachbau anstrebt. Solltet ihr dennoch auf unlösbare Probleme stoßen, hinterlasst einen Kommentar oder schreibt mir eine eMail 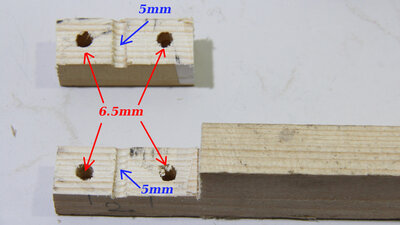
Die Gelenke bestehen aus Stücken von 6mm Gewindestange, die sich in justierbaren Lagern der Dachlatten drehen. Dazu werden als erstes 3 Bohrungen gesetzt: Die zentrale Bohrung besitzt einen Durchmesser von 5mm und ist somit etwas kleiner als die 6mm der Gewindestangen und die beiden Bohrungen zum Justieren des Gelenks sind mit 6.5mm etwas größer. Nun wird die Dachlatte eingesägt und damit ein Teil des Lagers abgetrennt. Das Gelenk dreht sich in der zentralen Bohrung und über zwei Schrauben in den größeren Bohrungen kann das Spiel der Anlenkung justiert werden. Ein wenig Wachs kann als Schmiermittel mit einem Föhn aufgebracht werden, wenn man auf besonders leichtgängige Gelenke aus ist - ich habe bei diesem Roboterarm darauf verzichtet. Selbst wenn das Lager sehr stramm justiert wird, lässt sich das Gelenk dennoch recht geschmeidig und ausreichend leichtgängig bewegen. 
Der Antrieb der Gelenke erfolgt über die Schrittmotoren und Spindeln der ausgeschlachteten CNC-Maschine. Die Messingmuttern sind an einem Hilfsrahmen aus Dachlatten befestigt. 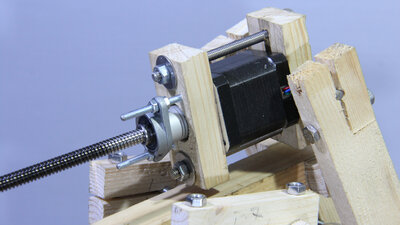
Gleiches gilt für die Schrittmotoren und die Kugellager der Spindeln. 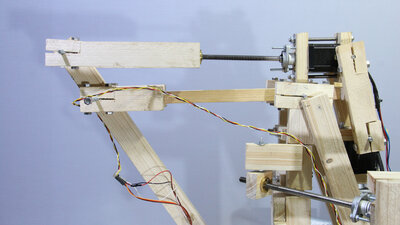
Die beiden zusätzlichen Drehpunkte des Antriebs sind nötig, damit Leitspindel und Motorachse in der Bewegung immer auf einer Linie liegen. Die Gesamtübersetzung des Antriebs wird von der Steigung der Spindeln und vom Abstand des Drehpunktes des Gelenks zum Befestigungspunkt der Spindel bestimmt. Je näher dieser am Drehpunkt ist, um so schneller kann sich der Roboterarm bewengen, je weiter weg, um so präziser und kraftvoller erfolgt die Bewegung. Die Gelenke können sich maximal um etwa 100 Grad drehen. 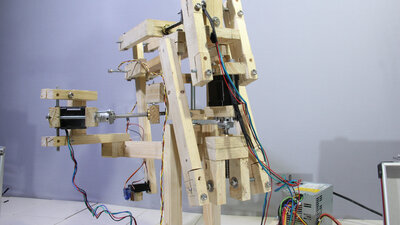
Die Achse zum Heben und Senken des Roboterarmes besitzt die kürzeste Spindel. 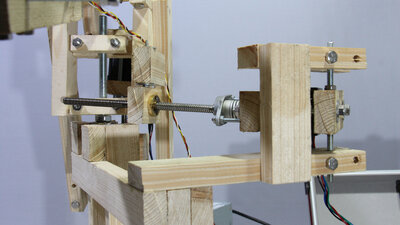
Das unterste Drehgelenk besteht aus einem Stück 10mm Gewindestange, um die Konstruktion stabiler zu machen. Hier habe ich die Messingmutter des Antriebes etwas einfacher befestigt: Einfacher bedeutet auch etwas weicher in der Anlenkung, die Version mit zwei Gegenlagern ist deutlich steifer. Da die Kraft auf dieses Lager eher gering ausfällt, funktioniert die einfache Version an dieser Stelle auch recht gut. 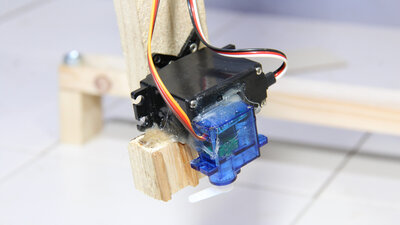
An der Spitze des Roboterarmes habe ich zwei Servos befestigt: Das Standardservo sorgt dafür, dass der Greifarm parallel zum Untergrund ausgerichtet werden kann und das kleine Mikroservo betätigt den Greifarm. 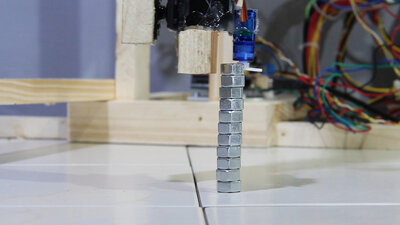
Die Spindeln eiern sichtbar, die Achsen sind nicht optimal ausgerichtet. Für das Greifen und Ablegen von Gegenständen ist dieses Rumeiern nicht wirklich von Bedeutung. Wichtig ist, dass ein und der selbe Punkt immer wieder genau getroffen wird und das funktioniert auch, wenn der Roboterarm sich nicht ganz linearer zum Zielpunkt bewegt. Zum Stapeln von 11 M8er Muttern hat die Präzision auf jeden Fall gereicht. TeilelisteDurch den Kauf von Bauteilen über die von mir angegebenen Affiliate-Partnerlinks in der Tabelle (oder in den Bannern auf meinen Seiten) unterstützt ihr meine Projekte - vielen Dank!Die Links anzuklicken bedeutet allerdings keinen Kaufzwang - völlig ungezwungenes Stöbern ist möglich ;-) Meine frei zugängliche Bildungsplattform ohne einzukaufen mit Hilfe einer Spende oder als Patreon zu unterstützen geht natürlich auch. Vielen Dank an alle, die mir bereits einen Obolus haben zukommen lassen!
Elektronik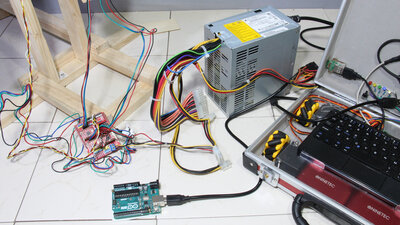
Die Elektronik der CNC habe ich unverändert übernommen: Es handelt sich um einen Arduino UNO mit aufgesteckter Platine zur CNC-Steuerung und die 12 und 5V Leitungen eines alten Computernetzteils dienen der Spannungsversorgung. Die beiden Servos habe ich an die Steuerpins für den Fräsmotor angeschlossen. Software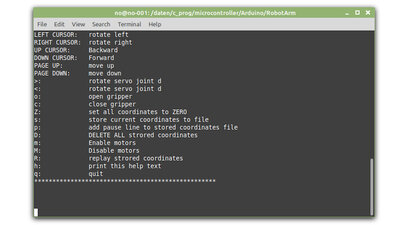
Auf dem Arduino läuft nicht mehr grbl, sondern ein auf die Schnelle geschriebener Sketch. Ein Pythonskript (geschrieben für Linux) sendet die Steuerbefehle zum Arduino. Befehle können entweder über die Tastatur eingegeben oder von einer Textdatei eingelesen werden. Diese Textdatei wird generiert, indem der Roboterarm per Tastatur zu den Zielpunkten dirigiert wird. Durch Drücken von "s" werden einzelne Zielpunkte in einer Textdatei abgespeichert, die anschließend durch drücken von "R" beliebig oft abgespielt werden kann. Das Python-Skript und der Arduino Sketch sind ein weiteres Beispiel zur Kommunikation zwischen PC und Arduino über die USB-Schnittstelle. Die Software gibt's als Download-Paket. Noch Fragen zum Projekt? Dann hinterlasst einen Kommentar auf dieser Seite oder sendet mir eine eMail. <<< Python: USB Kommunikation Maschinensteuerung per Webserver >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|