|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Ping Pong Plotter Roboterarm v1.0 >>> Roboterarm v0.1Das Video zum KapitelVersion 0.1
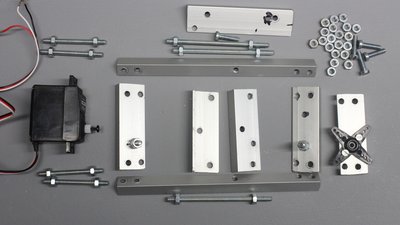
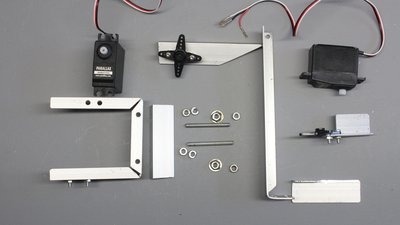
Von RS-Components habe ich ein Paket mit Elektronikteilen erhalten. Zusammen mit einer Grundplatte aus Holz, ein paar Aluleisten und Schrauben entsteht daraus ein einfacher Roboterarm. Teileliste
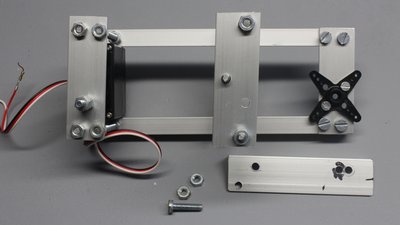
Mechanik
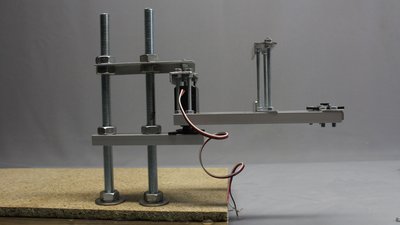


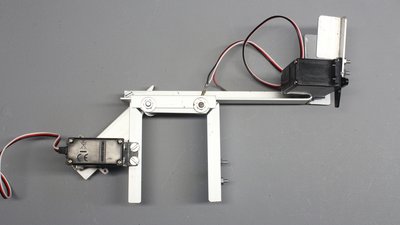
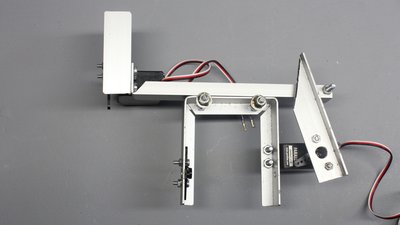
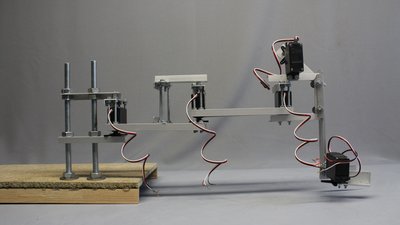
Ist der Roboterarm verdrahtet und die Software auf den Arduino aufgespielt, so sollten beim Einschalten der Versorgungsspannung die Gelenke des Roboterarms eine gerade Linie bilden und der Greifarm sollte auf halber Höhe stehen. Ansonsten sind die Servohebel entsprechend zu montieren. Elektronik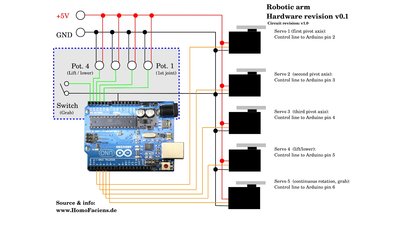
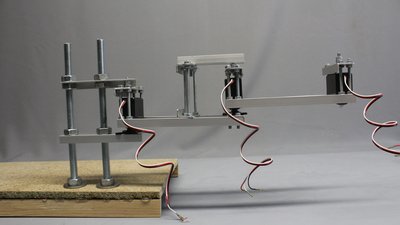
5 Servos und ein Arduino Uno werden für die Elektronik benötigt. Die 4 Potentiometer und der Schalter sind optional. Daraus kann der im Video gezeigte, kleine Roboterarm zur Fernsteuerung des großen Roboters gebaut werden. Zur Stromversorgung habe ich den 5V-Ausgang eines alten Computernetzteiles verwendet. SoftwareDie Software gibt's in der Rubrik Download.Damit der Roboter über das Browser-Interface angesteuert werden kann, muss auf dem Raspberry Pi der Apache Webserver laufen. Wie dieser einzurichten ist, steht in der Datei "readme.txt" des Download-Pakets. Anstelle des Raspberry Pi kann selbstverständlich auch ein anderer Linuxrechner verwendet werden. Die Installationsanleitung sollte für alle aktuellen Debian basierte Distributionen gelten. <<< Ping Pong Plotter Roboterarm v1.0 >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|