|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt CNC V3.1 - Linearantriebe und Eigenbau-DruckerDas Video zur CNC v3.1 (Drucker)Antrieb Druckkopf aus altem Drucker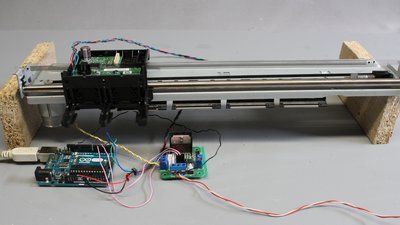
Dieser Linearantrieb stammt aus einem alten Drucker (HP DeskJet F4210). Der optische Sensor (Anschlussbelegung hier) ist mit zwei Eingängen (Pin 2 und 3) des Arduino Uno verbunden, der Elektromotor wird über eine H-Brücke (Typ L298N) von dem Mikrocontroller (Pin 5 und 6) angesteuert. 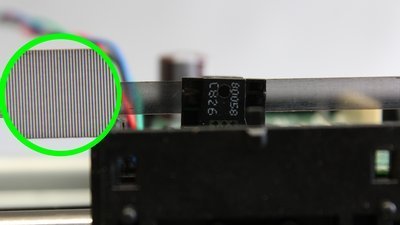
Der Plastikstreifen besitzt sehr feine Linien, die von dem optischen Sensor abgetastet werden. Das Funktionsprinzip ist in den Kapiteln zu Rotationssensoren und Gabellichtschranken genauer erklärt. Ein Vorteil des linearen Sensors ist, dass die tatsächliche Bewegung in Relation zu dem Sensorstreifen gemessen wird. Wird der Schlitten z.B. per Hand gestoppt, so bleibt der Motor dennoch eingeschaltet, bis die Mechanik wieder freigegeben wird und der vorgegebene Sollwert erreicht ist. Auch wenn der Schlitten durch Krafteinwirkung bewegt wird, wirkt der Mikrocontroller dieser Auslenkung entgegen - Spiel oder Schlupf in der gesamten Mechanik werden so zumindest zum Teil ausgeglichen. Für den Mikrocontroller ist die Bewegung des Schlittens relativ zu den feinen Linien auf dem Sensorstreifen von Bedeutung. Wird der Sensorstreifen von der Mechanik gelöst, so folgt der Schlitten der Bewegung des Plastikbandes, wenn dieses per Hand nach links oder rechts bewegt wird. Der Sensorstreifen sollte also spielfrei montiert und straff gespannt sein, was hier durch eine Aufhängung an einem dünnen Federstahl erreicht wird. Linearantrieb über Gewindestange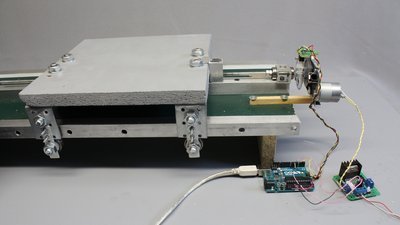
Die Drehbewegung von Elektromotoren wird oft mittels Spindeln in lineare Bewegung transformiert. Hier geschieht das über eine M6er Gewindestange. Dreht sich die Gewindestange, so bewegt sich der Schlitten längs der Führungen aus Aluminium-Vierkantrohren. Um die Mechanik leichtgängig zu gestalten, werden Kugellager verwendet. Das Funktionsprinzip ist in dem Kapitel zu Rotationssensoren ausführlich beschrieben. 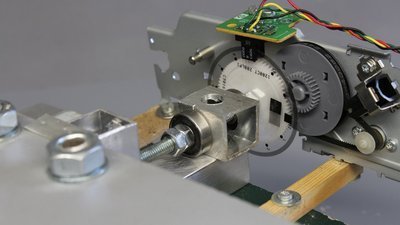
Als Antrieb eignen sich viele Getriebe-Elektromotoren (das Drehmoment von Direktantrieben ist üblicherweise zu niedrig). Dieser stammt aus einem alten Drucker und besitzt eine Untersetzung von 12:1. An dem mit der Gewindestange verschraubten Plastikzahnrad befindet sich die Sensorscheibe aus dem Drucker, die über die doppelte Gabellichtschranke abgetastet wird. Aufgrund der sehr feinen Teilung der Sensorscheibe entsprechen etwa 3000 Schritte einer Umdrehung der Gewindestange. Mit der Steigung von einem Millimeter pro Umdrehung entspricht ein Schritt des Antriebs einer linearen Bewegung von 0.3 Mikrometern - zumindest in der Theorie. In der Praxis ist das Spiel in der Anlenkung wesentlich größer als die errechnete Schrittweite. Dieses Spiel wird von dem Mikrocontroller nicht erfasst, kann also nicht ausgeglichen werden. Ein weiterer Nachteil besteht darin, dass pro Umdrehung sehr viele Pulse von dem Arduino erfasst werden müssen, was die maximale Drehgeschwindigkeit begrenzt. 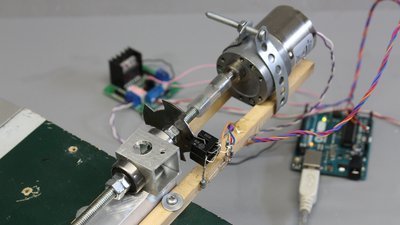
Mit zwei einzelnen Gabellichtschranken und einer gröberen Sensorscheibe aus Eisenblech mit 4 Zähnen erhalten wir 16 Schritte pro Umdrehung. Pro Schritt bewegt sich der Schlitten um 0.06mm - eine Aufllösung die für viele Anwendungen ausreicht. Der Motor ist ein Gleichstrom- Getriebemotor mit einer Untersetzung von 50:1. 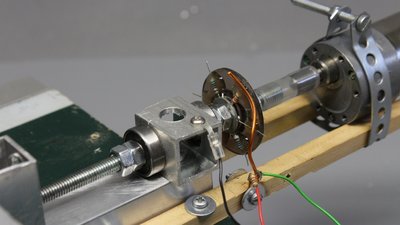
Mit der in einem vorangegangenen Kapitel gezeigten Sensorscheibe aus Widerständen funktioniert der Antrieb ebenfalls. Masse wird nicht durch einen zweiten Schleifkontakt auf die Gewindestange gelegt, sondern einfach über die Kugellager, die offensichtlich eine ausreichende Leitfähigkeit besitzen. Bei diesem Sensortyp begrenzen die schlechten elektrischen Eigenschaften in Form des Prellens die maximale Drehgeschwindigkeit. 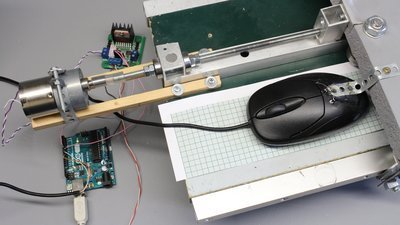
Prinzipiell eignet sich auch eine optische Maus als Sensor für den Antrieb. Wie die Bewegungsdaten ausgelesen werden können, ist in dem Kapitel zu Computermäusen beschrieben. Abgefragt wird in diesem Beispiel eines Linearantriebes lediglich die Bewegung längs der Y-Achse. 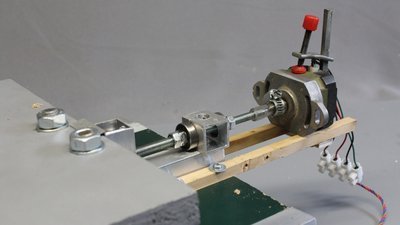
Wird ein bipolarer Schrittmotor direkt mit der Gewindestange verbunden, so funktioniert der Linearantrieb auch ohne Sensorrückkopplung. Bei dieser Art der Ansteuerung muss sichergestellt sein, dass das Drehmoment des Schrittmotors ausreichend hoch ist, so dass die Mechanik in ihrer Bewegung nicht unvorhergesehen gestoppt werden kann. Eigenbau Drucker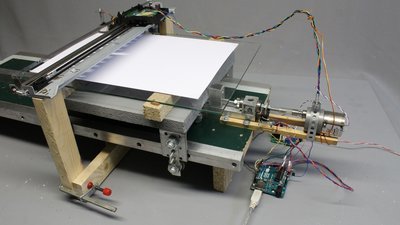
Der Schlitten aus dem Drucker ist senkrecht zur Bewegungsrichtung des Linearantriebes mit der Gewindestange befestigt. 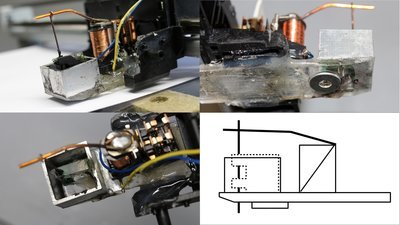
Als "Druckkopf" fungiert ein Relais, das über einen Hebel einen Metalldraht aus einem Farbbehälter auf die Papieroberfläche drückt. Die Unterlegscheibe schleift auf dem Papier und dient als Abstandshalter, damit der Ausdruck nicht verschmiert. Ich verwende Fassadenfarbe, da diese ausreichend dickflüssig ist. Sinnvoller ist einer lösbare Verbindung des Druckkopfes, um diesen nach getaner Arbeit leichter reinigen zu können. 
Das Funktionsprinzip ähnelt dem eines Nadeldruckers. Mit nur einer Nadel handelt es sich zwangsläufig um einen monochromen Drucker, der zudem recht grobe Bildpunkte produziert und keine allzu schnellen Ausdrucke liefert. Das Gerät eignet sich gerade deswegen hervorragend als Anschauungsobjekt, um die Funktionsweise von Druckern und den Aufbau von Rastergrafiken begreifbar zu machen. Ein Farbpunkt ist etwa 1mm groß, womit die resultierende Druckdichte 25 DPI beträgt. Um die 60 Minuten und 11000 Farbpunkte werden für den Ausdruck der Grafik mit 300 mal 318 Bildpunkten benötigt. Teileliste
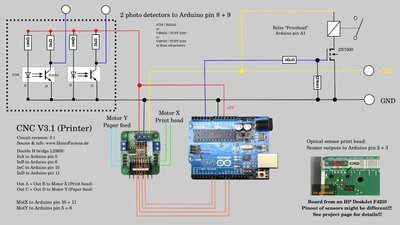
Schaltplan und Software zu dem Drucker und den in diesem Kapitel behandelten Linearantrieben gibt es als Download. Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|