|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< CNC v3.x Serie CNC v3.1 (Drucker) >>> CNC V3.0Das Video zur CNC v3.0Teileliste
Bauanleitung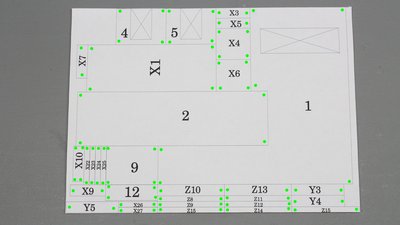
Die Vorlagen habe ich nur mit kleinen Tupfern aus Kleber an den Ecken der Bauteile mit der Pappe verklebt. Somit kann das Papier nach dem Ausschneiden leicht wieder entfernt werden. Außerdem wellt sich das Papier und die Pappe wenn man den Kleber flächig aufträgt. 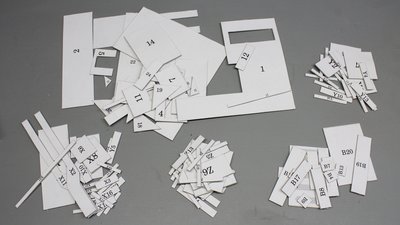
Alle Teile wurden mit einem scharfen Messer und einer Metallleiste als Führung ausgeschnitten. 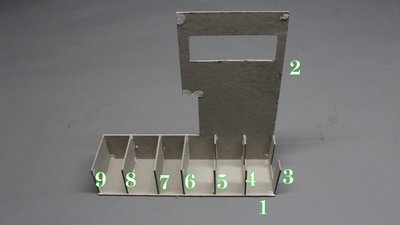
Der Grundkasten kann entweder mit dem LCD-Display auf der rechten... 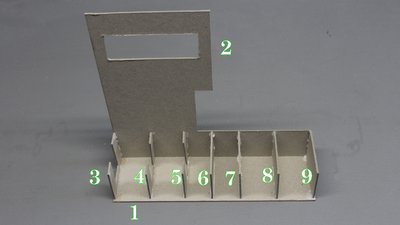
...oder linken Seite aufgebaut werden - so wie bei meiner CNC im Video. 
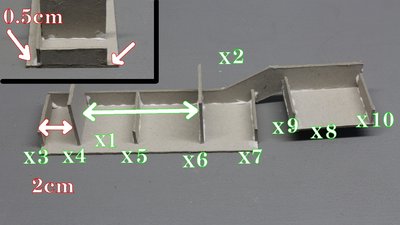
Die Mechanik der X-Achse: Zwischen Teil X4 + X6 muss Teil X12 passen. 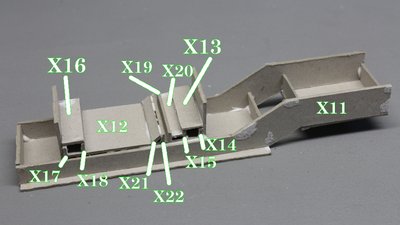
Zwischen X19 und X22 beim Zusammenkleben ein Stück Pappe als Abstandshalter klemmen (und beim Trocknen des Klebers immer mal bewegen, um ein Festkleben zu verhindern). 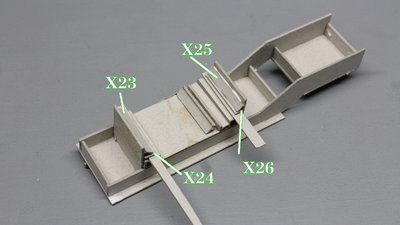
Beim Ankleben von X23 bis X26 wieder Abstandshalter aus Restpappe verwenden. 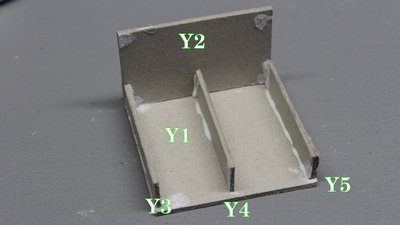
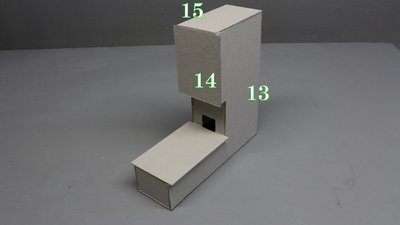
Die Mechanik der Y Achse. 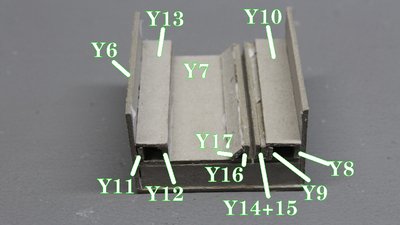
Zwischen Y14+15 und Y16 beim Kleben ein Stück Pappe als Abstandshalter verwenden. 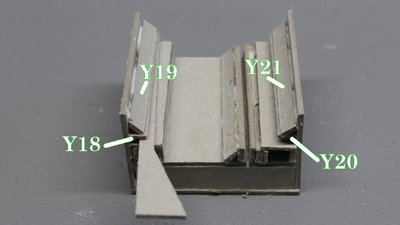
Gleiches gilt für die Spalte unter Y18 und Y20 (hier im Bild noch zu sehen). 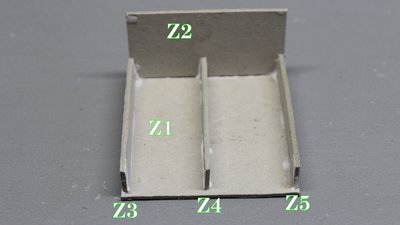
Nach dem gleichen Schema ist auch die Z-Achse aufgebaut. Teil Z6 wird nach dem Einkleben von Teil Z7 gegenüber von Z2 verklebt. 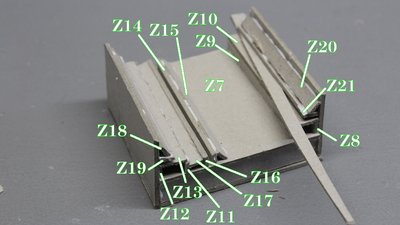
Abstandshalter aus Pappe sorgen für die richtige Breite der Führungsschlitze. 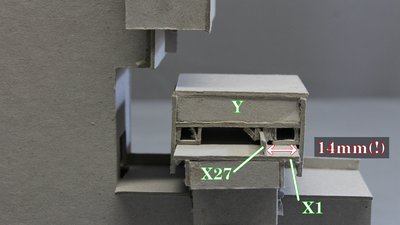
Beim Ankleben von X27 ergibt sich theoretisch ein Abstand von 14mm zur Kante von X1. Da leichte Ungenauigkeiten beim Bau zu berücksichtigen sind, sollte Y angehalten und der Abstand nachgemessen werden. Der Schlitten der Y-Achse sollte mit etwas "Luft" links und rechts der X-Achse passen. 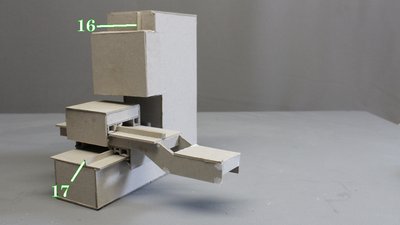
Gleiches gilt beim Ankleben von 16 und 17. 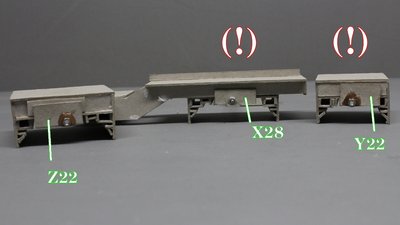
Die M3er Muttern halten am besten mit Epoxidharz, Weißleim wie ich ihn zum Kleben der Pappe verwendet habe, geht auch, benötigt aber wesentlich länger zum trocknen. Achtung! X28 und Y22 müssen auf der Rückseite dieser Abbildung befestigt werden, wenn die Maschine mit Servos ausgerüstet werden soll! 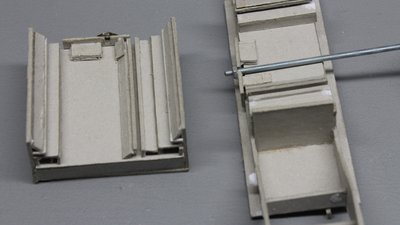
Mit Reststücken der Pappe wird die Verklebung verstärkt. 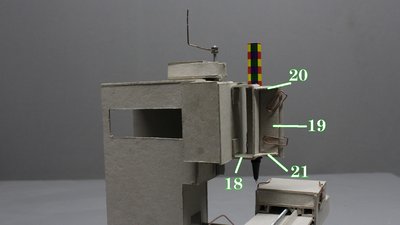
Befestigung des Stiftes an der Z-Achse. Der Kugelschreiber ist mit Heißkleber an einem Stück Pappe angeklebt und darüber mit Büroklammern befestigt. 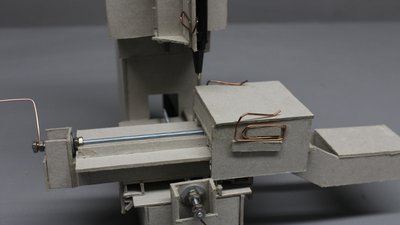
Mit Reststücken aus Pappe werden zwei Büroklammern am Schlitten der Y-Achse befestigt, um 5x5cm Papierstücke einklemmen zu können. Kurbelbetrieb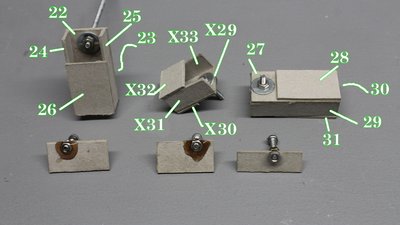
Die Befestigungen der Handkurbeln. 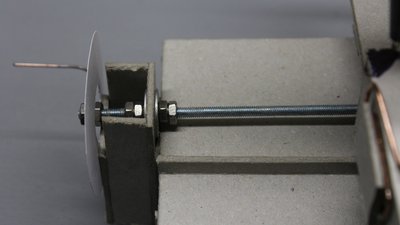
Jeweils sechs Muttern und zwei Unterlegscheiben werden benötigt, um die 3mm Gewindestangen und die Handkurbel zu befestigen. Die Längen der Gewindestangen: X=120mm Y=140mm and Z=100mm. 
Die "Software" besteht aus einer gedruckten Anweisung auf einem Blatt Papier. Die Anweisungen müssen Schritt für Schritt abgearbeitet werden, wobei zu beachten ist, welche Achse in welcher Richtung anzusteuern ist. Euer Gehirn ersetzt den Mikrocontroller, eure Hände die Schrittmotoren. Ein sehr anschaulicher Weg, das Grundprinzip rechnergestützter numerischer Steuerung zu erlernen. Elektronik
An einem Ende der Gewindestangen werden drei M3er Muttern angeschraubt und der Zwischenraum von etwa 10mm mit Epoxidharz umhüllt. An einer Stelle wird das Harz wieder bis auf das blanke Metall der Gewindestande abgefeilt. Die Längen der Gewindestangen: X=120mm Y=140mm and Z=100mm. 
Dieses Ende der Gewindestange wird mit den Servos verklebt - ich verwende Heißkleber, da dieser leicht flexibel ist und nachgibt,wenn die Gewindestange nicht hundertprozentig rechtwinklig und zentrisch angeklebt wurde. 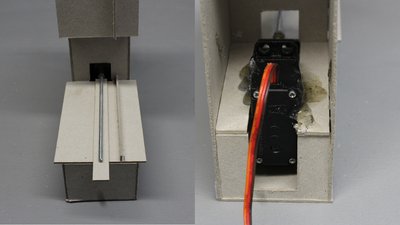
Beim Einkleben der Servos (ich verwende auch hier Heißkleber) müssen die M3er Gewindestangen parallel zu den Führungen ausgerichtet werden. 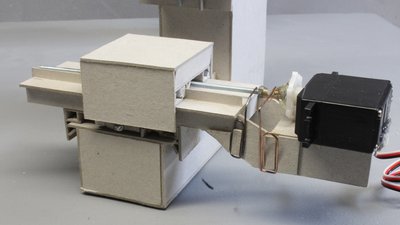
Als Drehsensoren fungieren Schalter aus zwei Büroklammern und der Gewindestange. 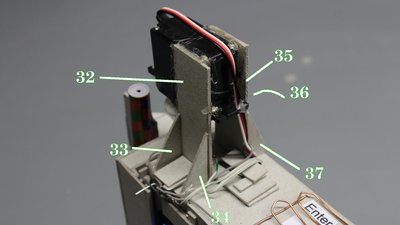
Befestigung des Servos für die Z-Achse. 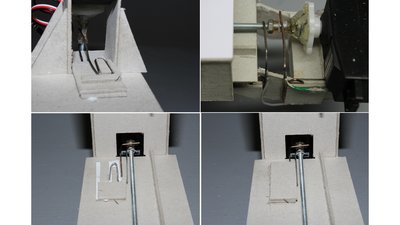
Werden die Büroklammern des Drehsensors übereinander verklebt, sollte eine isolierende Papierschicht eingefügt werden. 
Weitere zwei Büroklammern werden für die Endschalter benötigt. 
Über drei aus Büroklammern gefertigte Taster wird die Maschine bedient. 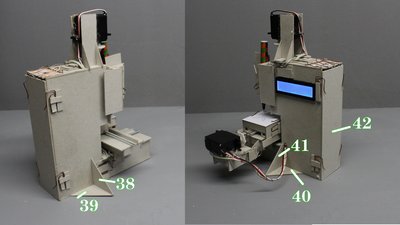
Um die Auflagefläche zu vergrößern werden die Teile 38 bis 42 angeklebt. Die Rückplatte wird von vier Büroklammern gehalten. 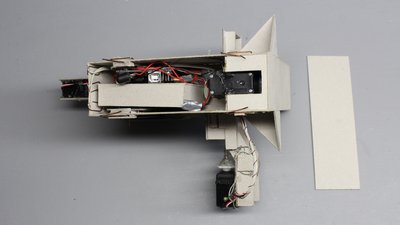
Arduino und Akkus passen in die Box. 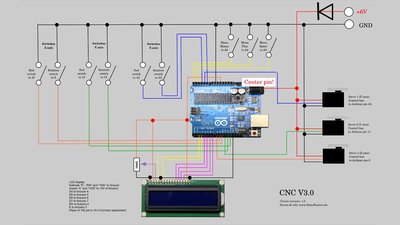
Schaltplan Akkuhalter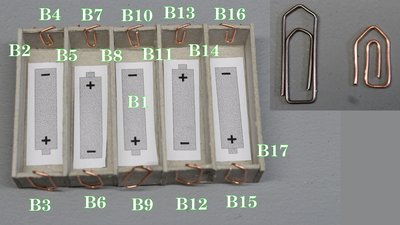
Ich habe aus großen Büroklammern kleine zurechtgebogen. 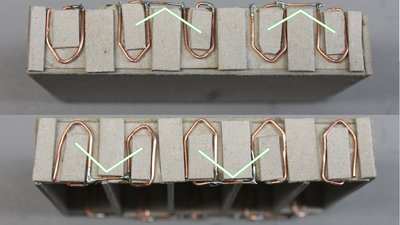
Je zwei benachbarte Büroklammern sind zusammengelötet. 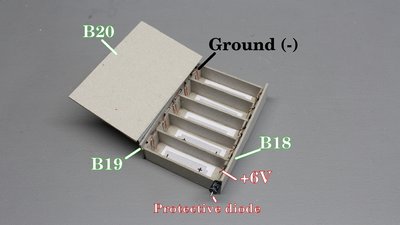
B18 bis B20 werden als isolierende Umhüllung benötigt. Eine Diode am Pluspol schützt die Elektronik vor falscher Polung. SoftwareDie Software kann Großbuchstaben und Ziffern plotten. Die dafür benötigten Daten sind im Programmcode gespeichert. Eigene Grafiken einzufügen ist daher momentan nur etwas für "Computerversteher".Über das Menue können die Motoren schrittweise angesteuert werden, was beim Zusammenbau und der Fehlerdiagnose sehr hilfreich ist. Den Arduino Sketch, sowie die Pläne zum Nachbau der CNC gibt's in der Rubrik Download. <<< CNC v3.x Serie CNC v3.1 (Drucker) >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
||||||||||||||||||||||||||||||
|
|