|
|
|
|
News The Project Technology RoboSpatium Contribute Subject index Download Responses Games Gadgets Contact Construction details LanderRead how to control the LanderControl the Lander The video about the construction detailsParts list
Robot arm
Like the Rover, the Lander is also made of materials stored in my cellar. It should be no problem for you to copy the mechanics. The robot arm is actuated by three servos. 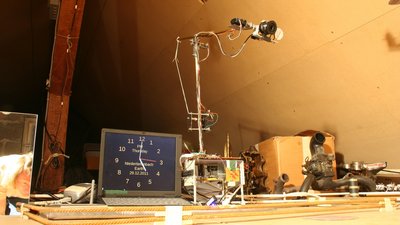
An old Laptop with a 333MHz CPU, 256MB of RAM and a 4GB hard disc serves as the hostcomputer of the Lander. The Linux distribution Knoppix in version 6.2 is running on the Laptop. Wiring scheme
Control softwareThe software of the Rover has been customized to meet the specifications of the Lander. The scripts "lander-server.perl", "watchdog-lander-server.perl" and "lander-status.pl" are installed at the Internet server, the scripts "lander-client.perl", "watchdog-lander-client.perl" and "lander-client-commands.perl" at the laptop of the Lander. The file "main.hex" is stored at the memory of the microcontroller.The source code of the software is available as Download. News The Project Technology RoboSpatium Contribute Subject index Archives Download Responses Games Links Gadgets Contact Imprint |
|
|