|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< SKT Version 2 LEDs schalten >>> Mikrocontroller-SetDas Video zum Mikrocontroller-SetZu kaufen gibt's das Mikrocontroller Starter Kit auf Gearbest InhaltDas Mikrocontroller Starterkit beinhaltet:1x Funduino-Board mit einem ATmega 328P Microcontroller und einer USB-Schnittstelle 1x Steckbrett Kabel mit Stecker/Buchse 1x USB-Kabel 1x 9V Blockbatterie-Adapter 1x Schrittmotor + Treiberplatine 1x Microservo 15x LEDs (5x Rot, 5x Gelb, 5x Blau) 18x Widerstände (8x 220Ω, 5x 1kΩ, 5x 10kΩ) 1x Potentiometer 1x RGB LED 1x 7-Segment-Anzeige (einzeln) 1x 7-Segment-Anzeigt (4-fach) 1x 8x8 LED Matrix 1x 2x16 Zeichen LCD 1x Sound-Level-Sensor 1x Buzzer 1x Piezo-Lautsprecher 1x IR-Fernbedienung + IR receiver 1x Relais 10A 1x 8x8 Tastenmatrix 1x RFID-Lesegerät 2x RFID-Modul (Schlüsselanhänger + Karte) 1x Wasserstandssensor 4x Taster 3x Lichtsensor 1x Shift-Register 
Die Komponenten des Funduino Starterkits. Beispielschaltungen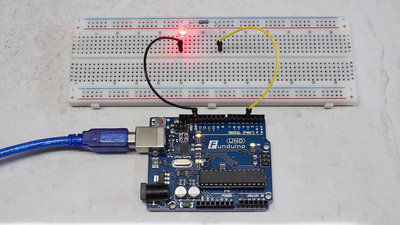
Physical Computing beginnt mit einer blinkenden LED. Zu beachten ist die korrekte Polung der LED (der kürzere Pin wird mit GND am Arduino verbunden) und der korrekte Reihenwiderstand (hier 220&Omega); 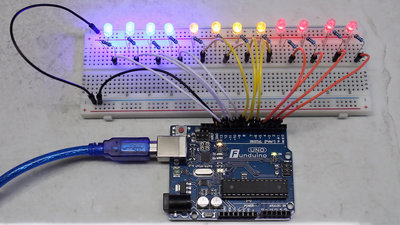
Was mit einer LED funktioniert, klappt auch mit mehreren LEDs. 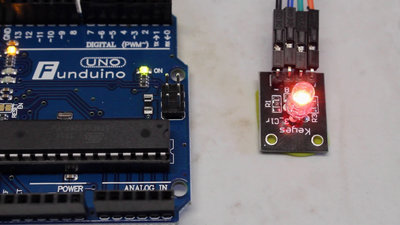
Drei LEDs in einem Gehäuse, mit den Farben Rot, Grün und Blau, zeigen, wie sich nahezu jede beliebige Farbe mischen lässt. 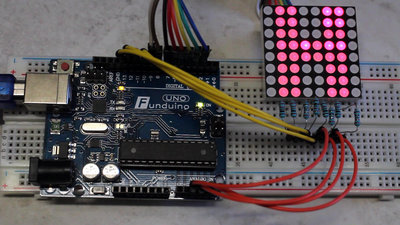
Viele LEDs in einer Matrix ergeben einen kleinen Bildschirm: Das hier zu sehende Exemplar besteht aus 8x8, also insgesamt 64 Bildpunkten. 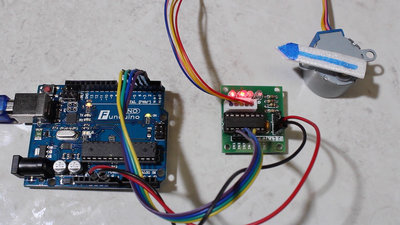
Für den hier zu sehenden Schrittmotor werden 4 Ausgänge benötigt. Je nachdem in welcher Reihenfolge die Pins angesteuert werden, dreht sich der Motor im oder entgegen dem Uhrzeigersinn. Die Frequenz, mit der die Pins geschaltet werden, bestimmt die Drehgeschwindigkeit des Motors. 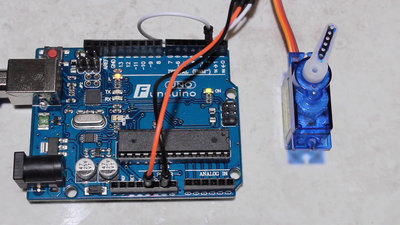
Servos sind kompakte Stellmotoren, die über einen einzelnen Pin angesteuert werden. Benötigt wird dazu an dem Steuerpin ein Pulsweitensignal mit einer Frequenz von 50Hz und einem Tastgrad zwischen 5 und 10 Prozent. Damit kann der Hebel des Servos zu einer beliebigen Position zwischen 0 Grad und 180 Grad dirigiert werden. 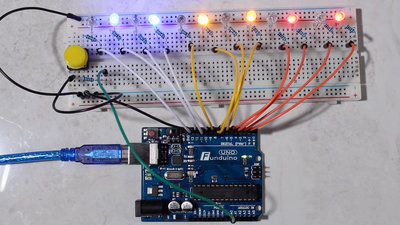
Steuern von Periperiegeräten wird erst dann richtig interessant, wenn der Mikrocontroller auf Einflüsse in seiner Umgebung reagieren kann. Die einfachste Form der Eingabe erfolgt über einen Tastschalter. 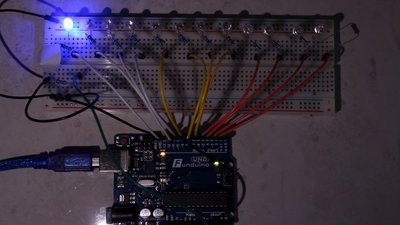
Anstelle des Tasters kann ein Sensor verbaut werden - hier ist ein lichtempfindliches Bauteil an dem Pin angeschlossen. Fällt Licht auf den Sensor, so ist die Situation für den Mikrocontroller die Gleiche als wenn der Taster des vorherigen Experiments geschlossen wurde. 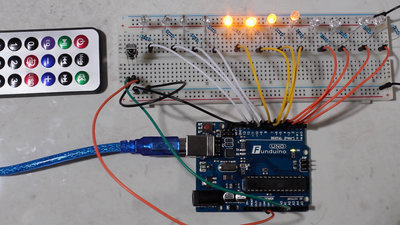
Wird infrarotes Licht verwendet, so funktioniert dieses Prinzip ebenfalls. Wer jetzt noch zu faul ist, die Pulsfrequenzen selber zu senden, greift zu einer Infrarot-Fernbedienung und drückt auf dieser lediglich die entsprechende Taste. 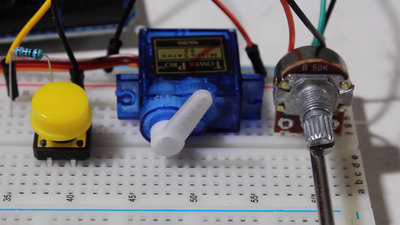
6 der Eingänge können nicht nur zwischen AN und AUS unterscheiden, sondern analoge Signale in einen digitalen Zahlwert umwandeln. Hier fungiert ein Potentiometer als Spannungsteiler und liefert Spannungswerte zwischen 0 und +5V. Damit kann der Drehwinkel des Potentiometers erfasst und das Servo des vorherigen Experiments synchron dazu angesteuert werden. Software macht's möglich, dass sich Potentiometer und Servohorn nach einem Tastendruck gegenläufig zueinander bewegen. 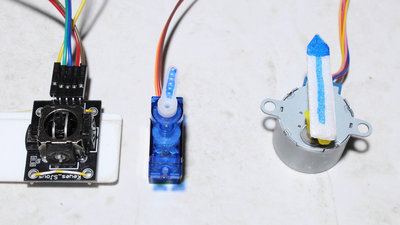
Ein Joystik besteht aus zwei Potentiometern, womit sich zum Beispiel das Servo durch horizontale Bewegung ansteuern lässt und der Schrittmotor durch vertikale Bewegung des Hebels. Ebenfalls integriert ist ein Schalter, womit sich - wenn gewünscht - per Software die Drehrichtung umkehren lässt. 
Anstelle des LED-Matrix Displays kann auch ein 2x16 Zeichen LCD angeschlossen werden. Somit können die Messwerte an den analogen Eingängen angezeigt werden. Im Kit enthalten ist ein Wasserstandsmelder, mit dem der Pegelstand in dem Wasserglas abgelesen werden kann. An einem zweiten Analogeingang ist ein Temperatursensor angeschlossen. Beide Sensoren zeigen die Rohdaten an, die im Bereich zwischen 0 und 1023 liegen. Die Sensoren müssen kalibriert werden, um die Umrechnungsfaktoren für Temperatur und Wasserstand zu erhalten. 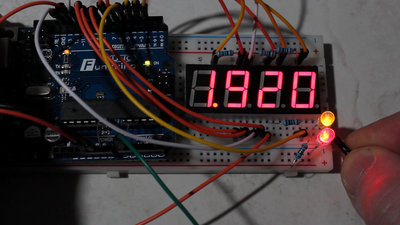
Reine Zahlwerte können über 7-Segment-Anzeigen ausgegeben werden. Entweder nur eine Stelle oder vier Stellen in einem Modul. Ausreichend Materialien für ein Eigenbau-Voltmeter. Achtung, das Voltmeter darf nur an Gleichspannungen zwischen 0 und +5V betrieben werden! 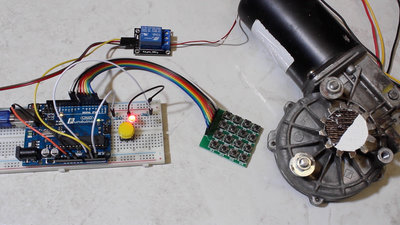
Um Pripheriegeräte mit hoher Leistung ansteuern zu können, muss das Signal an den Ausgangspins verstärkt werden. Hier geschieht das mit Hilfe eines Relais das Ströme bis zu 10A schalten kann. Und damit derart leistungsstarke Motoren nicht von jedem dahergelaufenen Assistenten eines Blödmanngehilfen eingeschaltet werden können, gibt man das Relais nur nach Eingabe eines speziellen Codes über die Tastenmatrix frei. 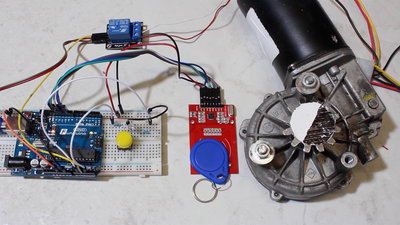
Das Entsperren geht einfacher und schneller mit dem RFID-Schlüsselanhänger, der dem Kit beiliegt. Dieser sendet einen Code an den Mikrocontroller, sobald der Chip wenige Millimeter vor das Lesegerät gehalten wird, womit der Motor ebenfalls freigegeben wird. 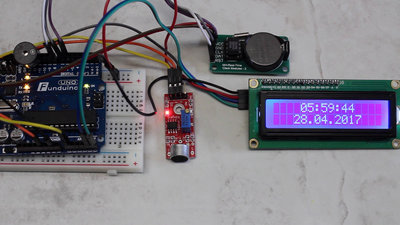
Dem Kit liegt ein Modul bei, mit dem Datum und Uhrzeit abgefragt werden können. die Uhr läuft batteriegepuffert weiter, auch wenn der Microcontroller ausgeschaltet oder per Reset-Taste neu gestartet wird. Somit könnt ihr Verbraucher zeitabhängig schalten. Mit dem Soundmodul wird aus der Uhr ein Wecker und mit dem Mikrofon-Modul könnt ihr das Wecksignal berührungslos wieder ausschalten. BeispielcodeDie in dem Video verwendeten Beispiele gibt's in der Rubrik Download.Die Anleitungen zur Verdrahtung stehen in den Quellcodes. <<< SKT Version 2 LEDs schalten >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|