|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Schalter einlesen PICO Servo >>> Digitaler ZollstockDas Video zum digitalen ZollstockMechanik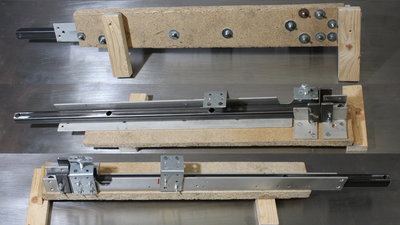
Die Mechanik besteht im Wesentlichen aus Stücken eines Aluprofils der Abmessungen 40x40mm, verschraubt auf einer 19mm Spanplatte. 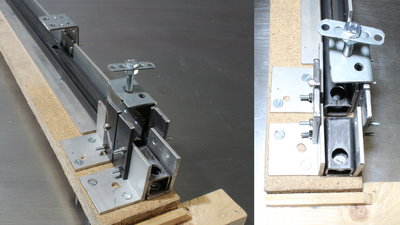
Die zu bearbeitenden Vierkantrohre werden mit einer Schraube fixiert. An den Kanten des Aluprofils befinden sich kleine Stücke Flacheisen - von diesen wird das Sägeblatt geführt. 
Das Sensorrad ist aus Papier ausgeschnitten und anschließend mit Farbe versiegelt worden. Die Zähne werden durch transparentes Klebeband geschützt und zwar von beiden Seiten. Die Achse der Sensorscheibe besteht aus einem 2.5mm Nagel. Dieser wurde mit Hilfe einer Ständerbohrmaschine und einer Feile auf beiden Seiten angespitzt. Auf diesen Nagel habe ich ein Stück eines Gummischlauchs geschoben - der Schlauch wird normalerweise als Spritleitung für Modellmotoren verwendet. Mittels Epoxidharz wird die Sensorscheibe auf der Achse verklebt. Gelagert ist die Achse zwischen zwei Stücken Flacheisen. Der Druck auf die Achse muss dabei über die M6er Gewindestangen so eingestellt werden, dass kein Spiel festzustellen ist, sich die Sensorscheibe dabei aber noch ausreichend leichtgängig dreht. Wieviele Zähne die Sensorscheibe haben muss, hängt von der gewünschten Auflösung ab. Mit dem Gummischlauch beträgt der Durchmesser der Achse 6mm. Der Umfang entspricht somit etwa 18mm. Um eine Auflösung von weniger als 0.2mm zu erhalten, werden mehr als 100 Pulse pro Umdrehung benötigt. Die von mir gefertigte Sensorscheibe besitzt 36 Zähne, also werden mit 2 Gabellichtschranken 144 Pulse pro Umdrehung erzeugt. Die rechnerische Auflösung beträgt somit etwa 0.13mm. Unter Berücksichtigung der in der Praxis vorhandenen Ungenauigkeiten in der Mechanik sind etwa 0.5mm ein realistischer Wert. 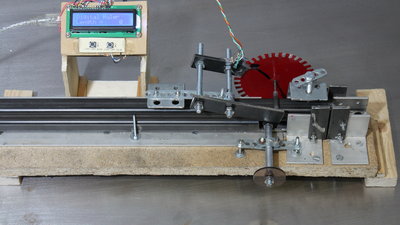
Der Arduino kann nur eine begrenzte Zahl Pulse pro Sekunde verarbeiten. Ob Pulse ausgelassen werden, lässt sich mit einem einfachen Experiment prüfen: Ein Zahn auf der Sensorscheibe wird markiert. Nun wird ein Vierkantrohr schnell nach rechts und langsam wieder zurück nach links bewegt. Ist der Zähler auf Null, so sollte sich der markierte Zahn ebenfalls wieder auf der Ausgangsposition befinden. Geeicht wird die Einheit, indem das Vierkantrohr um eine zuvor abgemessene Strecke verschoben wird - im Video sind das 40cm. Sind die Zählpulse bekannt, kann der Umrechnungsfaktor ermittelt werden. 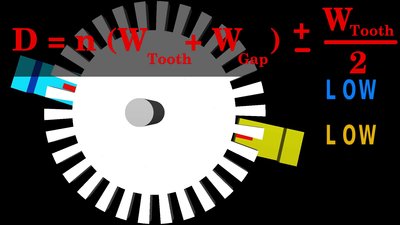
Der Abstand der beiden Gabellichtschranken muss einem ganzzahligen Vielfachen der Zahn- plus Lücke-Breite plus oder minus einer halben Zahnbreite entsprechen. Details gibt's im Kapitel zu Rotationssensoren. Ist der Abstand der Sensoren mit 6mm vorgegeben, so ergibt sich im Umkehrschluss eine minimale Zahnbreite von 2.4mm. Um etwas größere Toleranzen beim Schneiden der Sensorscheibe zu haben, bin ich auf einen höheren Wert von 4mm gegangen, der die Bedingung ebenfalls erfüllt. Elektronik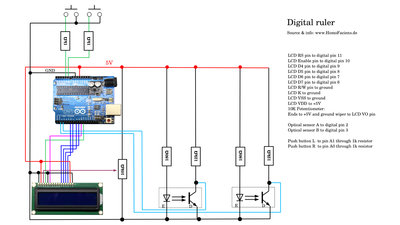
Schaltplan. Ein Arduino Uno, zwei Taster, zwei Gabellichtschranken, ein 2x16 Zeichen LCD und mehrere Widerstände werden zum Bau benötigt. SoftwareDen Arduino-Sketch findet ihr in der Rubrik Download. Detaillierte Erklärungen zur Software findet ihr im Quellcode des Sketches.Die beiden Gabellichtschranken sind mit den Pins 2 und 3 am Arduino Uno verbunden, die als Hardware-Interrupts fungieren. Wann immer das Signal an einem der beiden Eingänge von LOW auf HIGH oder von HIGH auf LOW wechselt, wird eine Subroutine ausgeführt, die den Zählstand entsprechend der Drehrichtung um 1 erhöht oder verringert. <<< Schalter einlesen PICO Servo >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|