|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Python: Hintergrundaktivität Apache Webserver >>> Python: KommandozeilenparameterDer Schaltplan zum Kapitel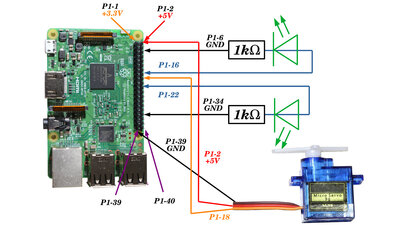
Zwei LEDs und ein Servo werden in den Beispielen dieses Kapitels geschaltet. Das Servo sollte ein Microservo (auch 9g Servo genannt) sein, da diese einen geringeren Strom ziehen als Standardservos. Alles zum korrekten Anschließen von LEDs an GPIOs gibt's im Kapitel zu LEDs mit Hilfe von GPIOs schalten. Welche Pins welche Funktion haben, ist im Kapitel zur Hardware des Raspberry Pi nachzulesen. Parameter beim Programmstart übergebenNeben dem Einlesen von Parametern aus einer Datei, können diese auch beim Start eines Skripts übergeben werden. Das folgende Beispiel arbeitet Parameter für zwei LEDs und ein Servo ab:
Speichert dieses Skript unter "/home/pi/commandline.py" und macht es ausführbar: chmod a+x background.py Ruft ihr das Programm auf, so könnt ihr die Pulsweite oder die Stellung des Servohebels als Parameter übergeben. Das folgende Beispiel setzt die Pulsweite von LED 16 auf 40%: ./commandline.py -pwm16 0.4 Um den Servohebel auf 45 Grad zu stellen, lautet die Befehlszeile: ./commandline.py -servo12 0.5 oder in der Langversion: ./commandline.py --servo-angle-pin-12 0.5 Es können auch mehrere Parameter gleichzeitig übergeben werden: ./commandline.py -servo12 -0.5 -pwm16 0.1 -pwm22 0.3 <<< Python: Hintergrundaktivität Apache Webserver >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|