|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R21 Pappe Meine Computerhistorie >>> Spannungsversorgung mobiler Roboter über StromschienenDer Film zum KapitelStromschienen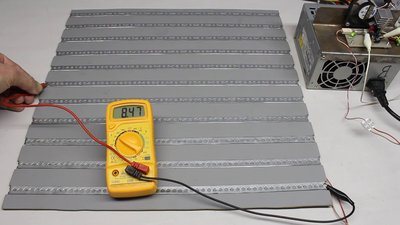
Die Grundplatte des hier vorgestellten Systems zur Energieversorgung mobiler Roboter basiert auf an einer Bodenplatte angebrachten Stromschienen und Schleifkontakten. Streifen mit Massepotential und +8.5V wechseln sich dabei ab. 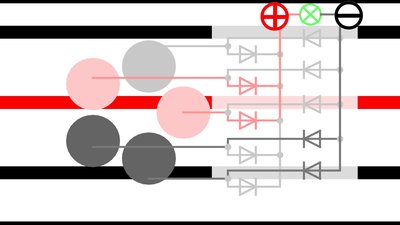
Benötigt werden mindestens 5 auf einem Kreis angeordnete - in diesem Fall runde - Schleifkontakte und 10 Dioden. Wird diese Anordnung über die Platte gezogen, so sind immer mindestens zwei der Kontakte mit unterschiedlichen Metallstreifen verbunden. Über die Gleichrichterdioden liegt am Eingang der Elektronik immer Spannung mit gleicher Polung an - so wie es sein soll. In der Abbildung befindet sich der Pluspol links und der Minuspol rechts der Last. 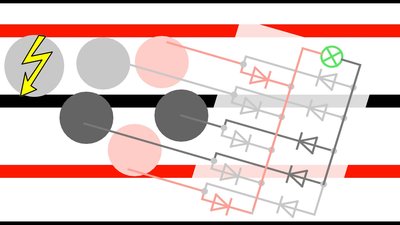
Die Lücke zwischen zwei Metallstreifen muss geringfügig größer sein als der Durchmesser der Schleifkontakte, da ansonsten ein Kurzschluss zwischen den Metallstreifen geschaffen würde! 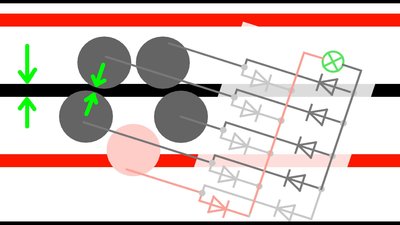
Die Metallstreifen müssen so breit sein, dass diese die Lücke zwischen zwei Schleifkontakten überbrücken können. 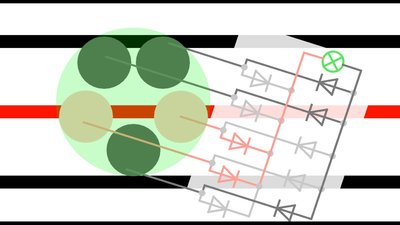
Der aus den Kontakten gebildete Kreis muss so groß sein, dass dieser insgesammt 3 Streifen gleichzeitig berühren kann. 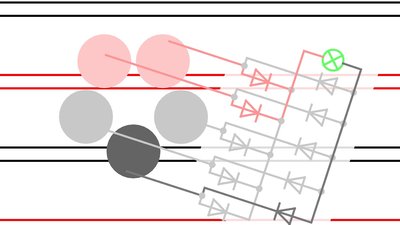
Anstelle massiver Metallstreifen können auch je zwei dünne Leitungen auf der Bodenplatte angebracht werden, deren Abstand der Breite des Streifens entspricht. Noch unauffälliger, aber aufwendiger in der Anfertigung sind einzelne Kontaktpunkte, die auf der Rückseite der Bodenplatte elektrisch leitend verbunden sind. 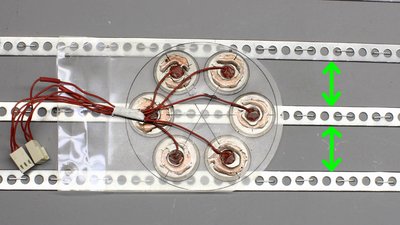
Werden mehr als 5 Schleifkontakte verwendet, so kann der Abstand zwischen den Metallstreifen auf der Platte vergrößert werden. Damit ist eine schlechtere Fertigungstoleranz beim Bestücken der Bodenplatte mit Metallstreifen ausreichend. 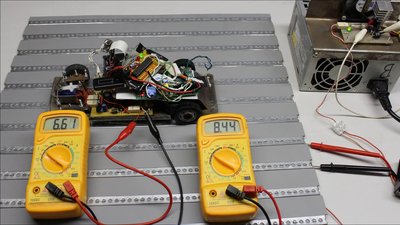
An den Stromschienen, vor allem aber an den Gleichrichterdioden fällt eine Spannung von immerhin 1.83V ab - in die Stromschienen muss also eine deutlich höhere Spannung eingespeist werden als von dem Roboter benötigt wird. Vor der Elektronik des Farhzeugs muss ein Festspannungsregler angebracht werden. 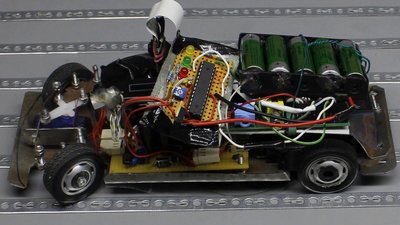
In der Praxis besteht kein ständiger Kontakt zu den Stromschienen, da die Oberflächen der Metallstreifen und Schleifkontakte nicht ideal glatt und sauber sind. Ein Computer reagiert auf derartige Unterbrechungen jedoch empfindlich. Als Zwischenspeicher für elektrische Energie können entweder große Kondensatoren, oder wie hier Akkumulatoren verwendet werden. Ist die elektrisch leitende Verbindung zu den Stromschienen kurzzeitig unterbrochen, so wird der Roboter aus den Akkus mit elektrischer Energie versorgt und diese werden entladen. Ist über die Stromschienen die Verbindung zur externen Spannungsversorgung wieder hergestellt, wird der Roboter hierüber versorgt und die Akkus werden wieder geladen. Es ist eine entsprechende Ladeelektronik nötig, um die Akkus im Dauerbetrieb nicht zu überladen. Der Aufwand ist nicht gerade gering, aber mit diesem System kann der Roboter 24 Stunden am Tag und 7 Tage die Woche betrieben werden. Vorteilhaft ist außerdem, dass kein Kabel im Weg ist, womit der Roboter auch durch "Unterführungen" und Tore fahren kann. <<< R21 Pappe Meine Computerhistorie >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|