|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< R6 (WLToys) R8 (Zombie) >>> Jule UJ99-2815B (R7) - KonstruktionDas Video zum Jule Rover Nummer 7Zu kaufen gibts den Jule UJ-2815B auf Gearbest. Das Basisfahrzeug, der Jule UJ99-2815B
Rover Nummer 7 basiert auf einem kommerziellen Modellauto, dem Jule UJ99-2815B. Die Abmessungen betragen etwa 22x15x10cm bei einem Fahrzeuggewicht von 430g. Nur die beiden durch eine starre Achse verbundenen Hinterräder des Fahrzeugs sind angetrieben, womit die Geländegängigkeit eingeschränkt ist. Die Fernsteuerung im Pistolengriff-Design benötigt 2 Batterien oder Akkus vom Typ AA, die nicht im Lieferumfang enthalten sind. Die Fahrzeugbatterie ist ein Nickel-Cadmium-Akku mit 4.8V Nennspannung und einer Kapazität von 700mAh, womit eine Fahrzeit von etwa 10-15 Minuten erreicht wird. Geladen wird der Fahrzeugakku über das beiliegende USB-Kabel, die Ladezeit beträgt etwa 3 Stunden. Umrüstung zum Rover R7Teileliste:
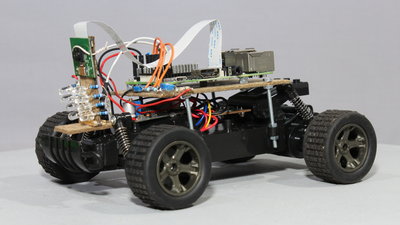
Für die Umrüstung habe ich einen Raspberry Pi 3, ein zugehöriges Kameramodul und einen Gleichspannungswandler benötigt. Die Komponenten habe ich für erste Testfahrten mittels Hartfaserplatten befestigt. 
Eleganter sieht die Lösung aus, wenn ein 3D-Drucker verwendet wird. 
Eine Karosserie, die vor Regen schützt, ist ebenfalls anzuraten, wenn das Fahrzeug auf Außeneinsätze geschickt wird. Ich habe auch hierfür einen 3D-Drucker verwendet - das kastenförmige Design bietet Platz für Aufkleber oder Beschriftungen. Elektronik
Die Fahrzeugbatterie habe ich durch 4 Nickelmetallhydrid Akkus der Standardgröße AA mit einer Kapazität von 1900mAh ersetzt. Für den Batteriehalter habe ich erneut einen 3D-Drucker angeworfen, da handelsübliche Batteriehalter zu groß sind. Die 4 Akkus passen gerade so in die Box im Fahrzeugboden. Beim Verlöten der Kontakte (Streifen Dosenblech), dieser erst nach dem Anlöten der Kabel zusammenbiegen, da ansonsten das Plastik schmilzt. Die Batterien sind so einzulegen, dass alle Pluspole nach oben zeigen (rechts unten)! Die Kontakte sind entsprechend mit Leitungen verbunden (links unten). 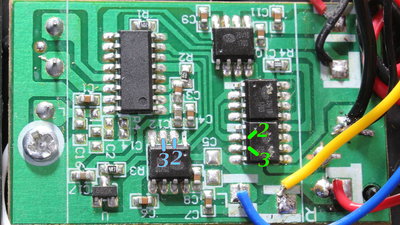
Wie im Video gezeigt, sind die Pins 2 und 3 die Eingänge der H-Brücken. Die Lenkung wird von dem Chip links unten in der Abbildung angesteuert, der Fahrmotor von den restlichen 3 H-Brücken, die parallel geschaltet sind. Der originale Microcontroller (großer Chip auf der Platine) arbeitet wie der Raspberry Pi mit einem Logik-Level von 3.3V. 
Der Mikrocontroller muss unbedingt von der Platine entfernt werden, da dieser ansonsten gegen den Raspberry Pi arbeitet und somit dessen GPIOs zerstören kann! Nach dem Entfernen unbedingt kontrollieren, ob dabei keine Lötbrücken entstanden sind. Beim Anlöten der Drähte zu den GPIOs muss ebenfalls unbedingt darauf geachtet werden, dass keine unerwünschte Lötbrücke entsteht. Das kann mit einem Multimeter in der Einstellung als Durchgangsprüfer getestet werden - nirgends darf eine leitende Verbindung zwischen den Lötstellen und den benachbarten Pins existieren! 1 Kiloohm-Widerstände unter Schrumpfschlauch schützen den Raspberry Pi für den Fall, dass beim Löten dennoch etwas schiefgelaufen sein sollte. Etwas Heisskleber an den Kabeln verhindert, dass die Lötstellen abgerissen werden. 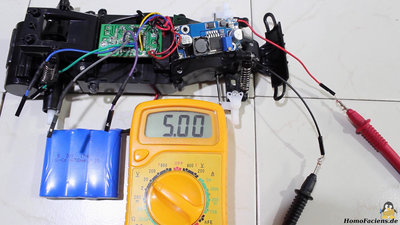
Während die H-Brücken direkt mit der Batterie verbunden bleiben, muss für den Raspberry Pi ein Gleichspannungswandler Verwendung finden. Die Ausgangsspannung des von mir verwendeten Modells ist einstellbar und muss vor dem Verbinden mit dem Raspberry Pi auf 5V justiert werden! 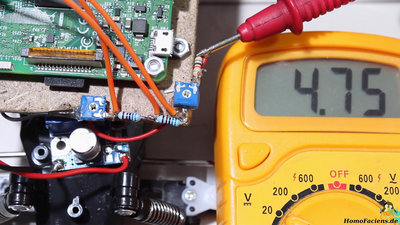
Die Entladeschlussspannung des originalen Nickel-Cadmium-Akkus liegt bei 3.6V. Als Sensor kommt ein Spannungsteiler bestehend aus 3 konstanten Widerständen und zwei Potentiometern zum Einsatz. Dieser ist mit 3 GPIOS verbunden, die als Eingänge mit deaktivierten pullup oder pulldown Widerständen geschaltet sind. 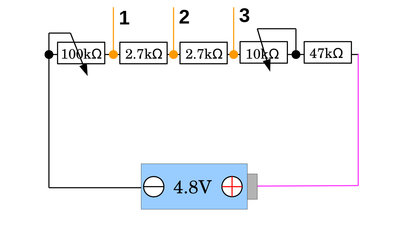
Die Batteriespannung wird durch den Spannungsteiler unterteilt. Dabei liegt an Messpunkt (3) die höchste Spannung an. Fällt die Spannung an diesem Punkt unter einen vorgegebenen Wert, so wird R7 abgeschaltet, um Tiefentladung des Akkus zu vermeiden. Die GPIOs des Raspberry Pi können nur digitale Signale verarbeiten, wobei der Zustand von HIGH auf LOW wechselt, wenn die Spannung am GPIO unter 1.17V fällt, wie im Kapitel zu Physical Computing gezeigt. Der Spannungsteiler muss mit den Potentiometern so eingestellt werden, dass diese 1.17V an Punkt (3) anliegen, wenn die Entladeschlussspannung des Akkus erreicht ist. Für den originalen Nickel-Cadmium Akku liegt die Entladeschlussspannung bei 0.9V pro Zelle, also bei Ich habe R7 auf Standard Nickel-Metallhydrid Akkus umgerüstet, für die eine Entladeschlussspannung von 1V pro Zelle, also Für die Messung müssen alle drei Messpunkte von den GPIOs des Raspberry Pi getrennt werden, da ansonsten die Messwerte verfälscht werden! Alternativ kann auch der Raspberry Pi eingeschaltet und die Pullup- bzw. Pulldown-Widerstände per Software deaktiviert werden. 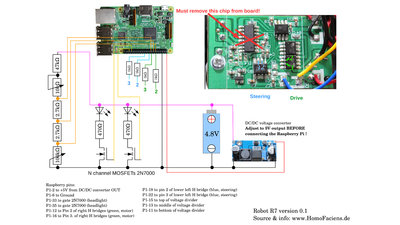
Schaltplan unter Verwendung der originalen Elektronikplatine des Fahrzeugs. 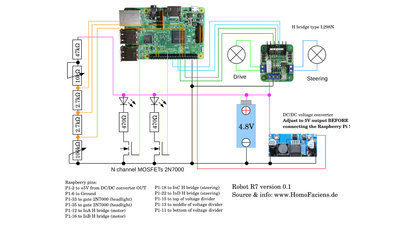
Schaltplan unter Verwendung einer H-Brücke mit L298N Chipsatz. Software/DownloadsDie Software von R7 ist noch in einem experimentellen Stadium. Die automatische Abschaltung bei Erreichen der Entladeschlussspannung ist noch nicht implementiert. Die Software basiert auf Raspbian Lite - den Download dieser Linux-Distribution inklusive Installationsanleitung gibt's auf der Seite der Raspberry Foundation. Verwendet eine Neuinstallation von Raspbian Lite!Wie - aufbauend auf Raspbian Lite - die Software von R7 zu installieren ist, steht in dem Download-Paket von R7, in dem auch die Schaltpläne und die 3D-Dateien enthalten sind. TestfahrtenDie 1900mAh Akkus von R7 erlauben eine Fahrzeit von bis zu 2 Stunden, der Rover ist somit nicht ständig im Einsatz. Ist demnächst ein Einsatz von R7 geplant, so erscheint im RoboSpatium sowie im R7 Kontrollzentrum ein Countdown im Meldefenster.Per Tweet werdet ihr über einen Start von R7 informiert, wenn ihr mir unter @RoboSpatium folgt. <<< R6 (WLToys) R8 (Zombie) >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|