|
|
|
|
News The Project Technology RoboSpatium Contribute Subject index Download Responses Games Gadgets Contact <<< 2D printer from 3D printer Robot arm v1.0 >>> Robot arm v0.1The video about robot arm v0.1Version 0.1
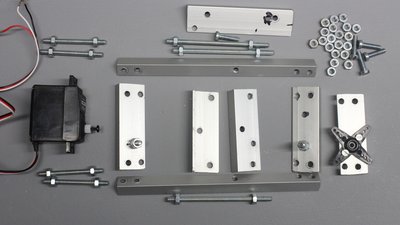
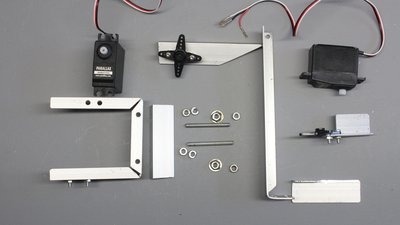
Parts list
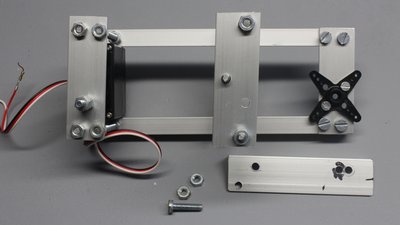
Mechanics
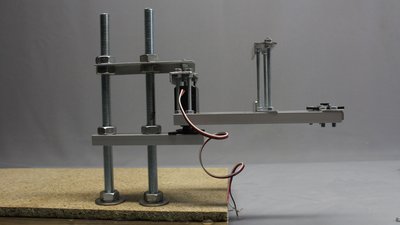


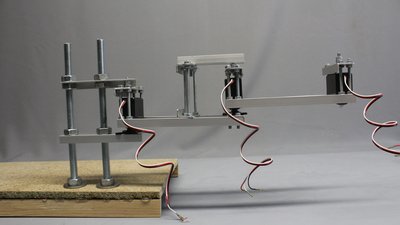
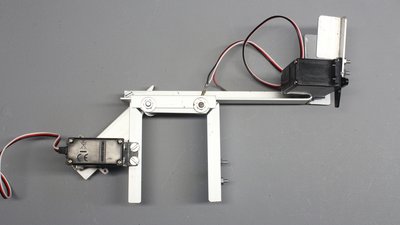
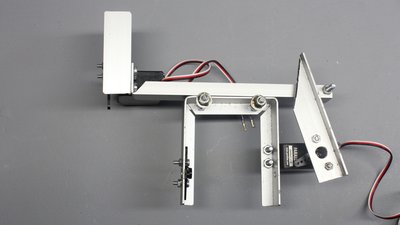
If the wiring is done and the software is loaded to the Arduino, all joints should be arranged on a streight line and servo 4 should lift the hand to half the maximum height as soon as the Arm and Arduino get powered. If not, remount the servo horns to adjust the arm correctly. Electronics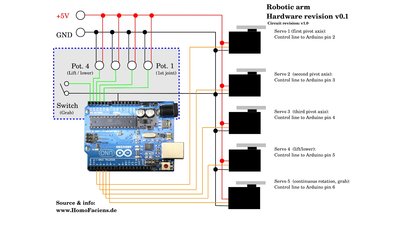
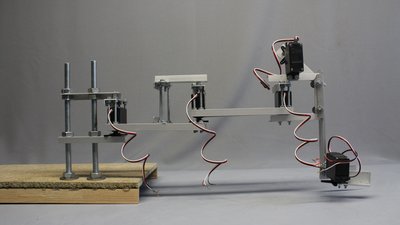
5 servos and an Arduino Uno are needed for the electronics. The 4potentiometers and the switch are optional. You those parts to compose a tiny robotic arm that can control the large robot as shown in the video. An old computer power supply feeds the arm with electricity. SoftwareYou can get the software package in the column Download.To be able to control the robot through the browser interface, you must ensure that Apache is running on your Raspberry Pi. The installation procedure is described in the "readme.txt" of the software package. Instead of a Raspberry Pi you can also use any Linux computer with a USB interface and Apache. The installation procedure should be identical for all Debian based distributions. <<< 2D printer from 3D printer Robot arm v1.0 >>> News The Project Technology RoboSpatium Contribute Subject index Archives Download Responses Games Links Gadgets Contact Imprint |
|
|