|
|
|
|
Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Download Reaktionen Spiele Gadgets Kontakt <<< Aufero Laser 2 V-Plotter >>> Plotter-CDROMDas Video zum KapitelVideos von Nachbauten: Hemant's Konstruktion mit einem Holzrahmen sieht deutlich besser aus als mein Plotter: https://www.youtube.com/watch?v=jK5uRJdbG3o&feature=youtu.be Sendet mir den Link zu einem Video eures Nachbaus - ich mag diese Form der Rückmeldung. Danke! Mechanik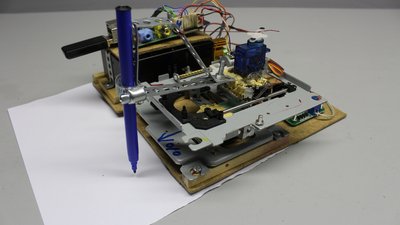
Der hier gezeigte akkubetriebene WLAN-Plotter besteht aus zwei alten DVD-Laufwerken, einem Servo, vier H-Brücken und einem Raspberry Pi. 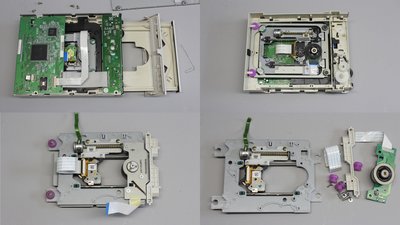
Aus den Laufwerken wird der Motor mit der Mechanik zur Positionierung des Lasers benötigt. Bei dem Motor handelt es sich um einen Schrittmotor. Dummerweise besitzen viele, aber nicht alle optischen Laufwerke einen Schrittmotor - ich hatte eine Trefferquote von 2 zu 1. 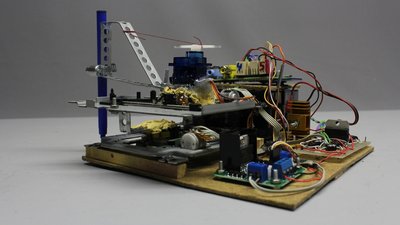
Die beiden Mechaniken für die X- und Y-Achse sind senkrecht zueinander an dem Laserkopf der unteren Mechanik mit Spachtelmasse verklebt. An der oberen Mechanik ist dazu ein Streifen Lochblech festgeschraubt. 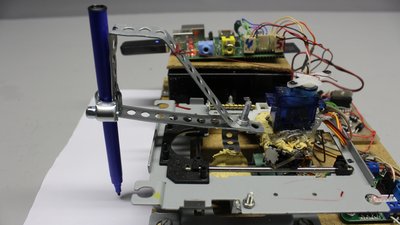
Der Halter für den Stift des Plotters besteht ebenfalls aus einem Streifen Lochblech und ist mit Spachtelmasse am Laser der oberen Mechanik verklebt. Ein Servo kann das Blech biegen und den Stift somit anheben beziehungsweise absenken. Elektronik
Der Schrittmotor besitzt vier Anschlüsse: Jeweils zwei Anschlüsse sind mit einer Spule verbunden. Mit Hilfe eines Multimeters in der Funktion "Durchgangsprüfer" kann festgestellt werden, welche Anschlüsse zu je einer Spule gehören. 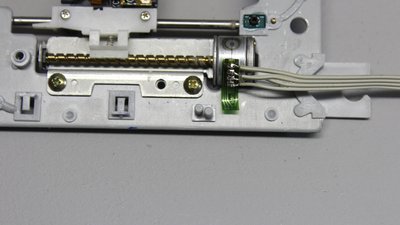
Die Folie an den Pins sollte nicht entfernt werden, da sich dabei die sehr dünnen Kupferdrähte der Spulen ebenfalls von den Anschlüssen lösen und der Motor somit unbrauchbar wird! Was zu lang ist, kann von der alten Zuleitung abgeschnitten werden. Die neuen Zuleitungen werden mit den Pins verlötet. 
Die Platine mit der zweifachen H-Brücke verfügt über vier Ausgänge: Je ein Paar der Ausgänge muss mit je einer Spule des Schrittmotors verbunden werden. Weiterhin besitzt die Platine vier Eingänge, die mit vier GPIOs des Raspberry Pi verbunden werden müssen. Schließlich muss die Versorgungsspannung von 5V an die beiden Anschlüsse "Ground", also Minus und "VCC", also Plus gelegt werden. Eine einzelne Spule des Motors zieht einen Strom von fast 500mA, daher kann dieser nicht über den Raspberry Pi mit 5V versorgt werden! Die 5V-Leitung eines alten Computernetzteils oder ein Akku kann als Quelle für elektrische Energie verwendet werden. 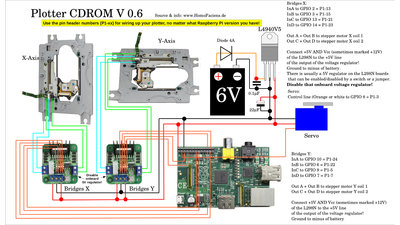
Der Schaltplan meines Plotters. Haltet auch an die Pin header Nummern (P1-xx) auf dem Plan, egal welche Version des Raspberry Pi ihr verwendet! Zu den GPIO-Nummern existieren zwei unterschiedliche Angaben, was dazu führt, dass der Plotter nicht korrekt arbeitet, wenn ihr euch an die falsche Nummeriereung haltet. SoftwareDie Software dieses Plotters läuft unter der Kommandozeile und kann daher auch per ssh von jedem anderen Computer aus bedient werden. Den Quellcode findet ihr in der Rubrik Download.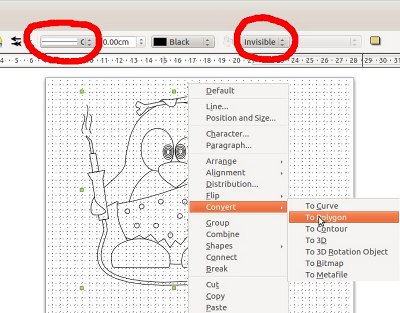
Die Software des Plotters kann Bitmaps (*.bmp) mit der Auflösung 55 x 55 Pixel und einer Farbtiefe von 24 Bit verarbeiten. Alle anderen Einstellungen werden nicht akzeptiert. Farbpunkte mit einem Rot-, Blau- oder Grün-Anteil kleiner als 200 werden als "Schwarz" interpretiert und gezeichnet. Alle anderen Punkte werden entsprechend als "Weiß" interpretiert und ausgelassen. Die Software zur Ansteuerung der Maschine ist in C geschrieben und diese wird über die Kommandozeile bedient. Über das Menü kann die Datei mit dem Testmuster angewählt und es können verschiedene Parameter festgelegt werden. Das unterstützte Vektorformat ist "Scalable Vector Graphics (*.svg)". Dabei sind einige Besonderheiten zu beachten: Es können keine Flächen sondern lediglich Linien (Pfade) gezeichnet werden. Sämtliche Pfade müssen als "Polygon" vorliegen. Getestet habe ich die Software mit Grafiken, die ich mit Libre Office Draw bearbeitet und exportiert habe: 1.) Grafik mit LibreOffice Draw erstellen 2.) Strg + 'a' drücken, um alle Objekte zu markieren. 3.) Auf "Ändern -> Umwandeln in -> Polygon" klicken. 4.) Linien auf "Durchgehend" und Farbe Schwarz setzen. 5.) Flächen auf "Unsichtbar" setzen. 6.) Exportieren als *.svg 7.) Datei in das Unterverzeichnis "pictures" im Installationsverzeichnis der CNC-Software kopieren. Viel Spaß mit dem Plotter!
Durch den besonderen Aufbau der Mechanik können mit einem wasserfesten Stift auch Grafiken auf Gegenständen aufgebracht werden. Der Bewegungsraum des Stiftes beträgt etwa 35 x 35mm. Für die Bewegung um 35mm benötigen die Motoren 250 Schritte. Der hier zu sehende Schriftzug ist deutlich größer als der Bewegungsraum des Plotters. Nach dem Zeichnen eines Buchstabens wird der Plotter daher einfach ein Stück nach Rechts verschoben. <<< Aufero Laser 2 V-Plotter >>> Neuigkeiten Das Projekt Technik RoboSpatium Unterstützung Stichwortverzeichnis Archiv Download Reaktionen Spiele Verweise Gadgets Kontakt Impressum |
|
|